上海交通大学2016届优异学士学位论文(TOP1%)近日揭晓,必赢线路检测中心陈涛、陆张吉、潘帅航3位学生获评上海交通大学优异学士学位论文。
在2016年本科生毕业设计(论文)评选活动中,必赢线路检测中心经答辩专家两次遴选后,推荐了5位学生参选, 学校从论文的难度、工作量、研究过程、研究结果以及答辩表现各方面综合考察学生素质, 最终3位学生获此荣誉。
附:本科生优异学士学位论文(TOP 1%)毕业设计(论文)简介
学生姓名:陈涛
指导教师:谷国迎
论文题目:基于气动人工肌肉的软体操作手设计与应用
论文简介:本论文针对多腔式软体驱动器进行了深入的分析与探究。利用Abaqus软体完成对多腔式软体驱动器的有限元建模以及仿真。有限元分析中采用网格收敛指数方法确保有限元分析结果的收敛性。基于有限元分析方法,本文从定性与定量两个角度探究了该类驱动器弯曲角度以及末端作用力受气压作用以及驱动器几何尺寸变化的影响关系,并且通过实验验证了有限元分析模型的正确性以及各变量间影响关系的正确性。借助有限元分析的结论,本文设计了两类基于气动软体驱动器的软体操作手。第一类软体操作手由四个多腔式软体驱动器组成,实现抓取功能,尤其适用于抓取脆性大或者表面易受损的物体。第二类软体操作手采用类人手形状设计,辅助指关节受损患者进行康复训练,关节数与人手指关节相同,每个驱动器弯曲时最大程度地接近真实手指弯曲的形状,从而将驱动器的弯曲作用力充分作用于手指,提高康复训练效果,同时以其软体特性避免了康复器对 患者造成二次伤害。
软体操作手-抓取
.png)
软体操作手
-康复
.jpg)
陈涛与指导教师谷国迎合影
学生姓名:陆张吉
指导教师:习俊通
论文题目:基于移动小车的大型薄板零件轮廓形线测量系统研制
论文简介:船舶工业的发展日渐迅猛,目前已发展成为我国的主要产业力量之一。其中,船舶加工的质量对于船舶工业的发展有着极为关键的作用。并且目前对于大型薄板零件的质量测量的研究几近空白。因而本课题旨在研制一款大型薄板零件轮廓形线测量系统,对于船舶用的肋骨、横梁这类关键性支撑构件的制造精度进行判定。
测量系统主要由三部分组成:机械系统、控制系统以及软件系统。
机械系统主要实现了三方面的功能:移动平台贴合轮廓侧壁连续运行、激光跟踪仪靶球跟踪机构以及磁栅局部位移测量机构。
控制系统主要完成了移动平台驱动pid速度闭环反馈、基于陀螺仪的靶球跟踪反馈、数据采集以及移动平台和上位机之间的通讯这四方面的内容。
最后软件系统主要实现了:与移动平台的通讯及控制、数据存储及处理以及图像显示。
这三部分使廓线测量系统具有了普适性强、测量自动化、快速、精度高的优点。通过测量实验,得到了系统的测量精度,对于直线侧壁的测量精度可达2mm,对于肋骨曲线侧壁的测量精度达3mm。
大型薄板零件轮廓形线测量系统
.jpg)
陆张吉与指导教师习俊通合影
学生姓名:潘帅航
指导教师:张执南
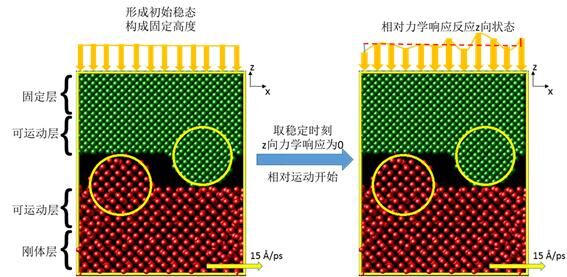
论文题目:微动界面摩擦行为的分子动力学模拟
论文简介:本研究以航天器连接部件和活动部件的微动界面为研究对象,针对微动界面及其涂层防护界面的摩擦行为,开展分子动力学模拟以及试验研究(Molecular Dynamics Simulation, MD模拟)。首先,研究了分子动力学的建模方法和仿真分析流程。然后,利用LAMMPS仿真模拟软件,实现了对多组固-固(金刚石-金刚石;金刚石-晶体硅;石墨烯-石墨烯)耦合微动界面摩擦过程的研究,分析了连续单凸体摩擦接触过程中完整的摩擦力学响应和摩擦力法向力学响应。研究结果表明,在航天器工作状态下,对于微动界面的摩擦现象,物质的聚集形态、摩擦配副物质宏观硬度差异以及物质微观成键作用都会对连续摩擦过程造成影响,甚至会在摩擦接触的间隙(单凸体非接触状态)因为变形回复、原子界面散布并释放应力而导致较大的力学响应,这样的力学响应甚至会超过其余摩擦接触状态下的力学响应峰值。同时,在连续摩擦状态下,三维固体耦合微动界面的摩擦现象必须关注摩擦接触间隙的力学响应特征;而对于石墨烯一类的二维构型物质,连续摩擦过程中不再有明显摩擦间隙,且随着石墨烯基体由2层增厚到9层,摩擦接触向完全摩擦接触过程的过渡时间由4.6 ps缩短到3.0 ps,实现摩擦响应的稳定波动。
潘帅航与指导教师张执南合影

.png)
.jpg)