

动物脑机接口的快速埋植系统设计与开发
“优秀设计”二等奖资助企业:
 海安上海交通大学智能装备研究院
海安上海交通大学智能装备研究院
企业导师: 周恩权

指导教师: 盛鑫军
项目成员: 韩博,高冰鉴,崔灿灿,吴宇峻
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
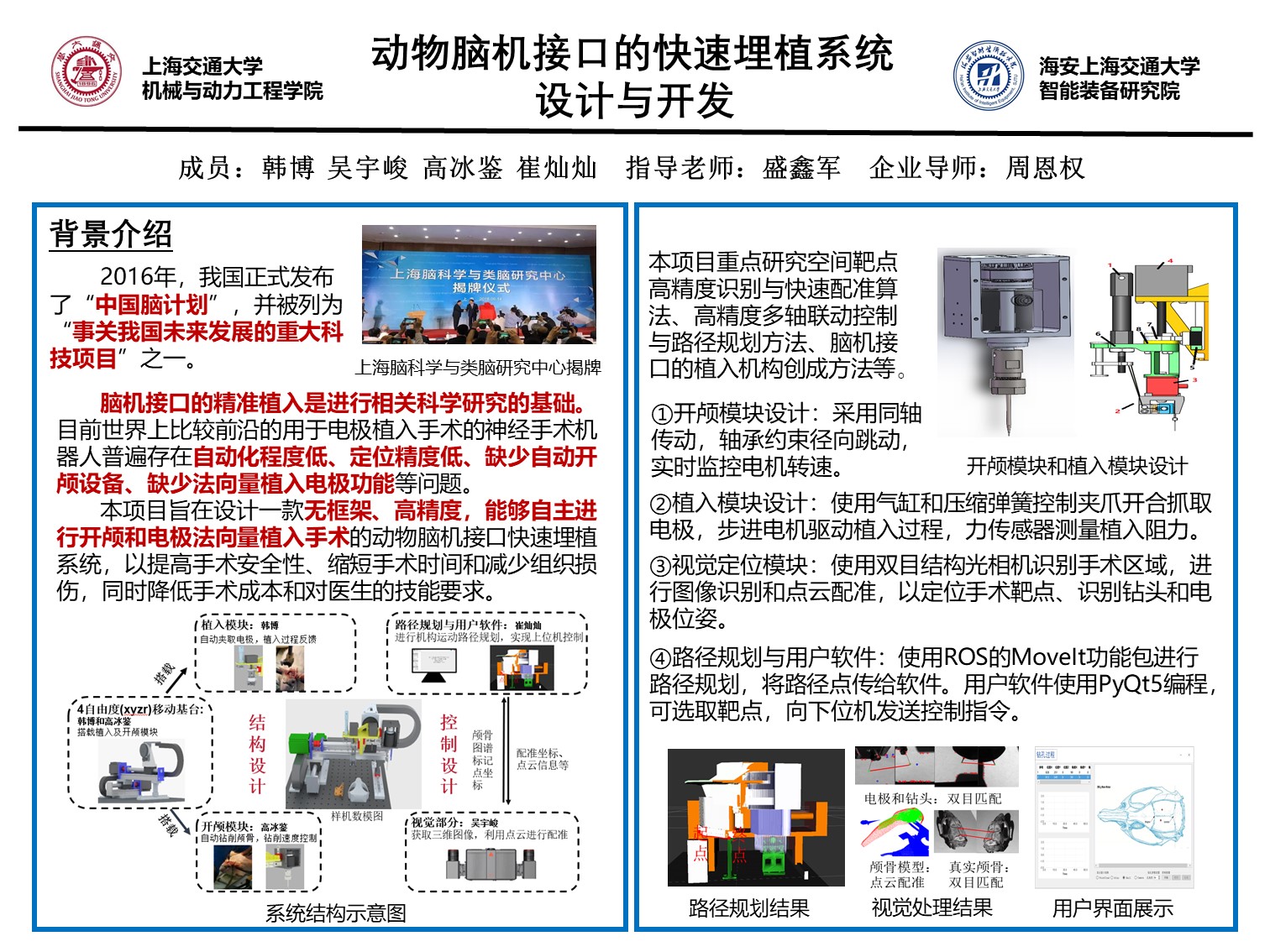
目前世界上比较前沿的用于电极植入手术的神经手术机器人普遍存在自动化程度低、定位精度低、缺少自动开颅设备、缺少法向量植入电极功能等问题。本项目旨在设计一款无框架、高精度,能够自主进行开颅和电极法向量植入手术的动物脑机接口快速埋植系统,以提高手术安全性、缩短手术时间和减少组织损伤,同时降低手术成本和对医生的技能要求,为日后研发适用于其他动物与人类的脑机接口埋植系统提供参考。
项目目标
1. 研究高精度、高安全性、高灵活性的传动机构、开颅模块和快速植入模块,达到快速且可靠的植入要求。
2. 构建基于视觉识别的空间位置捕捉系统,获取大鼠颅骨解剖特征,用于解析植入靶点位置以及植入角度;开发高精度、高分辨率的识别与配准算法,实现对手术执行模组的定位。
3. 开发手术路径规划算法,基于视觉识别数据实现高精度、高灵活性、高效率的三维路径规划;设计可视化交互界面,实现人机协同工作,为医生开展手术提供便利。
项目成果
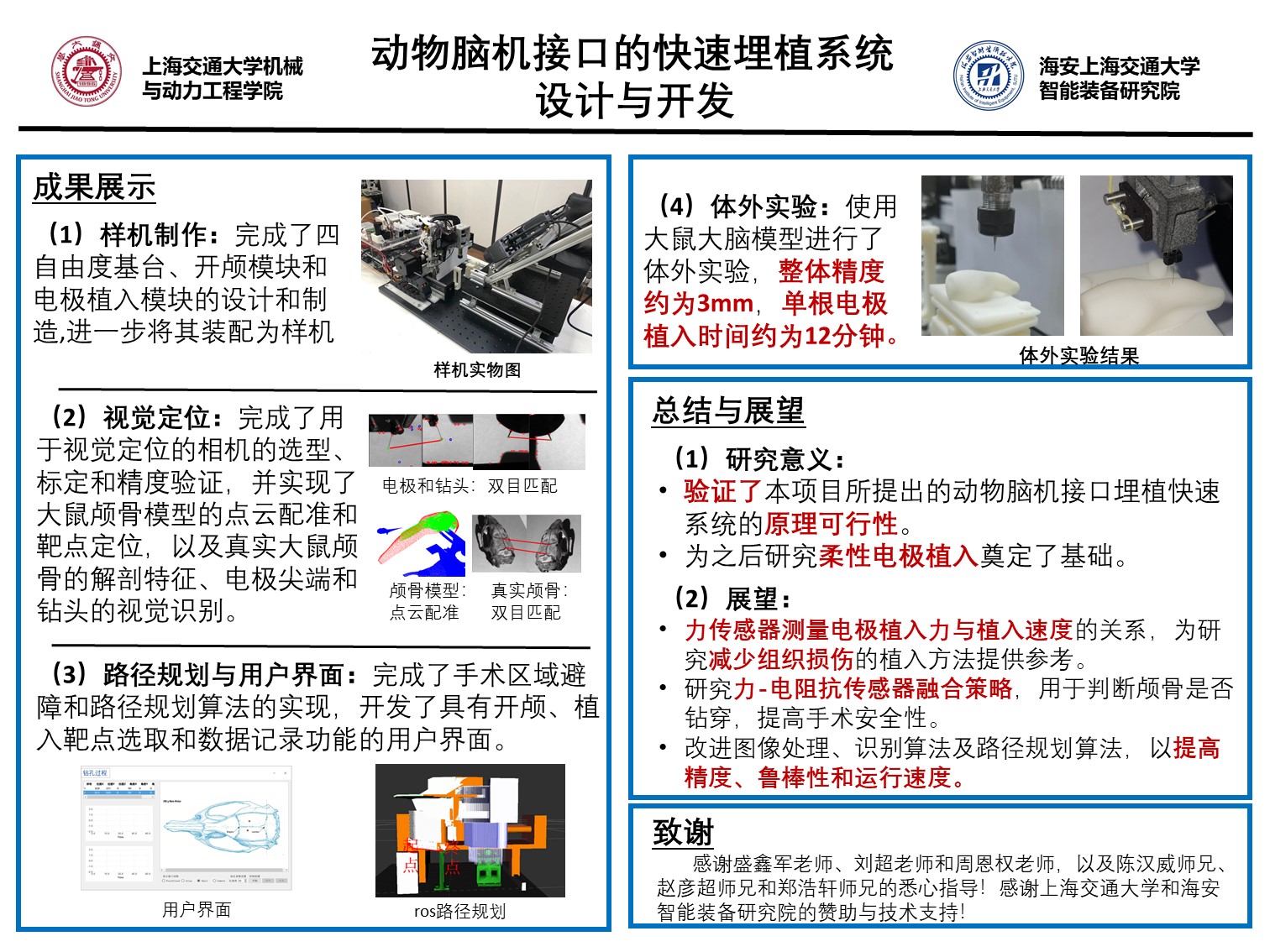
1. 完成了四自由度基台、开颅模块和电极植入模块的设计和制造,在大鼠颅骨模型上开展了开颅和植入实验。
2. 完成了用于视觉定位的相机的选型、标定和精度验证,并实现了大鼠颅骨模型的点云配准和靶点定位,以及真实大鼠颅骨的解剖特征、电极尖端和钻头的视觉识别。
3. 完成了手术区域避障和路径规划算法的实现,开发了具有开颅、植入靶点选取和数据记录功能的用户界面。
4. 进行了整机联合测试,整体精度约为3mm,单根电极植入时间约为12分钟。




