

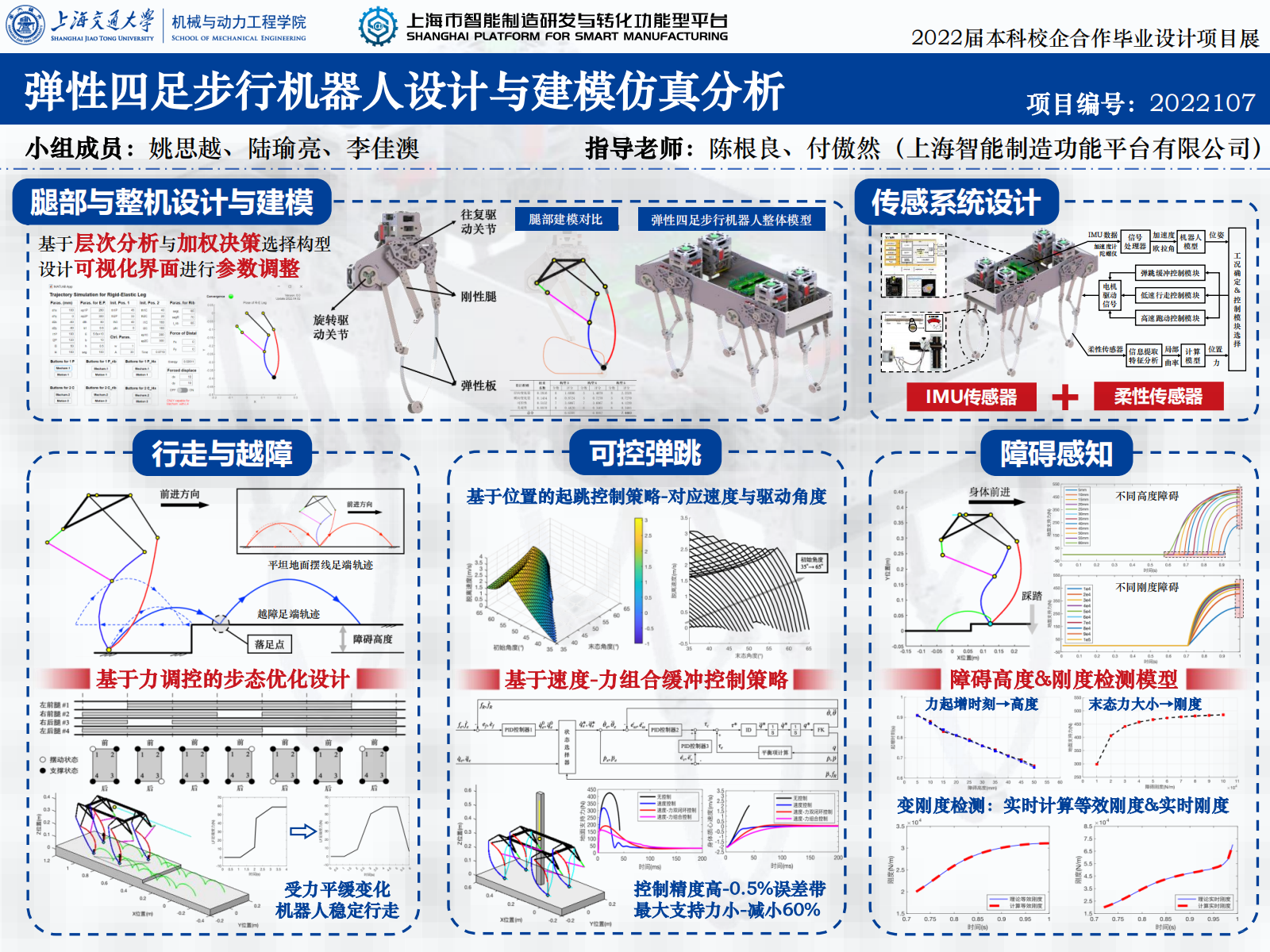
弹性四足步行机器人设计与建模仿真分析
“优秀设计”二等奖资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
企业导师: 付傲然

指导教师: 陈根良
项目成员: 李佳澳,陆瑜亮,姚思越
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
随着科技发展,机器人越来越多参与到复杂、极端的环境中作业,如科考救援、星际探索、军事侦查等。强地形适应性、环境感知能力以及运动稳定性是该类机器人的核心需求。本课题将弹性板引入四足机器人设计,利用弹性板大变形与储能特性设计出一种新式的弹性四足步行机器人,建立实体模型并实现弹跳落地缓冲、行走步态控制与环境感知分析等功能的闭环传感反馈控制。
项目目标
(1)完成一种基于弹性板的弹性四足步行机器人的构型设计,并完成实时且有较高精度的力学建模。
(2)设计传感器布置方案与反馈算法并减小传感器读数随机误差带来的影响。
(3)基于传感器信息实现反馈控制,完成对周围环境的感知
(4)实现行走步态控制与起跳落地缓冲控制,减小结构在运动过程中所收到的刚性冲击。
(5)完成所需的驱动部分设计与实物部分设计,并绘制相应的三维模型与零件图。
项目成果
(1)本项目初步完成了弹性四足步行机器人的结构设计与实体设计,实现了将电机匀速转动变换为往复摆动的驱动机构。
(2)本项目建立了腿部的力学模型,同时使用冗余数量的传感器实现了对外部载荷的感知反馈。利用传感信息,完成了对障碍高度与刚度的检测方案与仿真。
(3)本项目完成了对腿部的主动控制仿真,设计整机行走步态与控制策略,同时实现了机器人从起跳到落地缓冲完整过程的动态仿真,减小了对机构的刚性冲击。




