

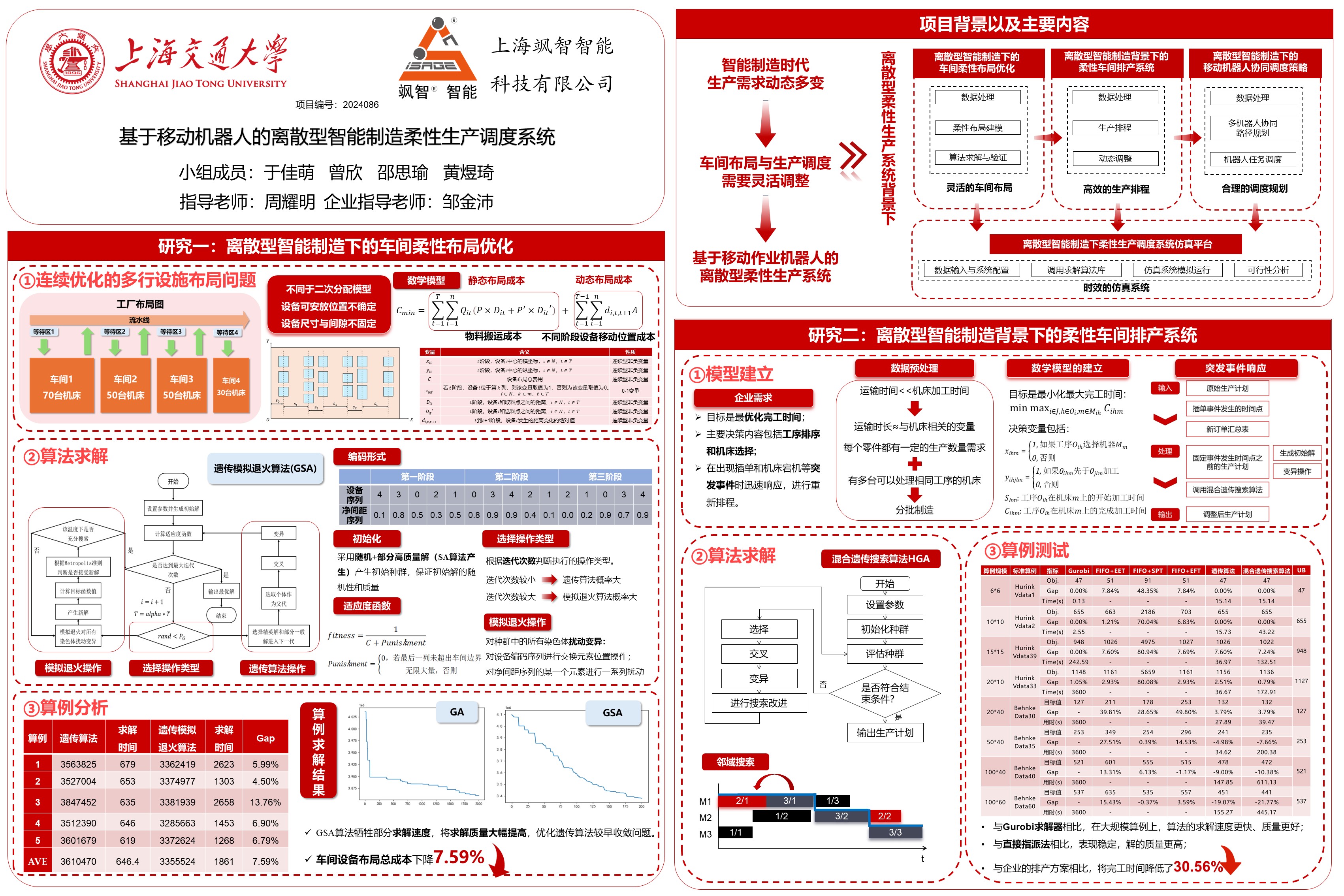
基于移动机器人的离散型智能制造柔性生产调度系统
“优秀设计”三等奖资助企业:
 上海飒智智能科技有限公司
上海飒智智能科技有限公司
企业导师: 邹金沛

指导教师: 周耀明
项目成员: 于佳萌,曾欣,邵思瑜,黄煜琦
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
离散性智能制造下的柔性生产,在当前小批量多品种生产需求场景下具有重要意义。其中移动作业机器人(AMR)能够实现可移动共融作业,在工业生产中具有灵活性,广泛应用于生产制造的内部物流。本项目设计了一种离散型柔性布局车间智能排产与移动机器人调度方法,同时考虑了离散型制造下柔性车间布局的生产排程和移动作业机器人的调度,采用启发式方法在保证精度的情况下,提高求解效率。
项目目标
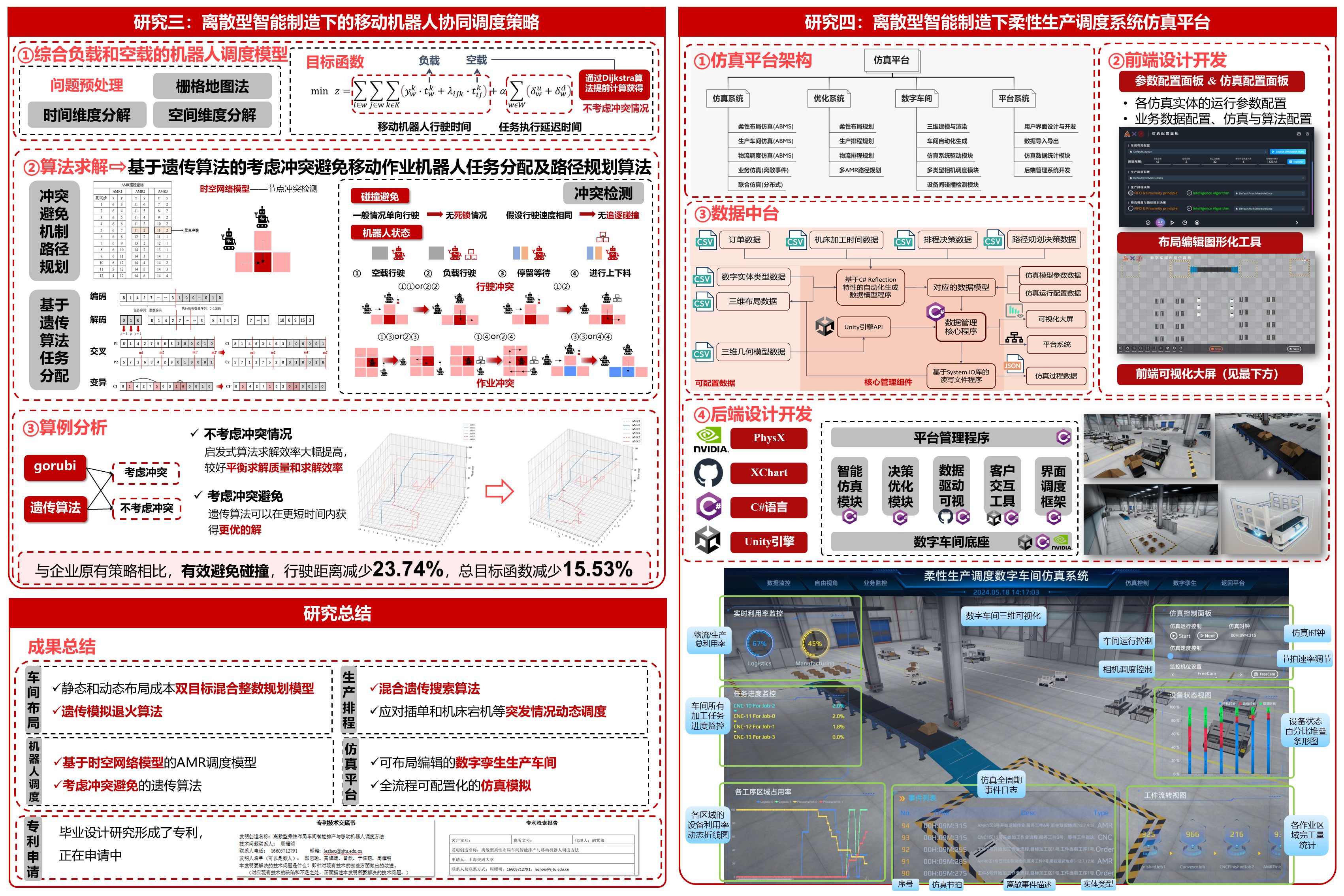
柔性布局方面,充分考量车间布局问题中的各个要素,并将动态布局成本纳入优化目标以实现柔性布局。生产排程采取动态的生产排程策略,通过将生产排程问题划分为连续的静态生产排程区间,并在线优化每个滚动区间,可以灵活应对急件工件插入、交货期变更等不可预料的事件。移动机器人调度部分,以动态厂房布局和柔性生产排程作为输入,对移动作业机器人执行任务情况进行具体分析。仿真部分,采用C#编程语言和Unity引擎,设计并开发了综合仿真平台软件。
项目成果
柔性布局方面,建立有效的数学模型,实现快速高效柔性的车间布局求解。移动机器人调度部分,建立数学模型,设计优化算法实现AMR任务指派和无冲突路径规划,帮助企业在保证生产效率的同时降低运营成本,并尽可能避免生产过程中的延迟和AMR间的冲突。仿真软件涵盖了从车间布局、生产排程、任务指派、多机路径规划到车间业务全流程的三维可视化应用、数字实体控制应用、仿真应用以及决策与优化应用。




