

K-Clip经导管三尖瓣成形系统手术模拟器
机械工程资助企业:
 上海汇禾医疗科技有限公司
上海汇禾医疗科技有限公司
企业导师: 徐军

指导教师: 盛鑫军
项目成员: 李杨 李卓航 鄢思迟 张若珩
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
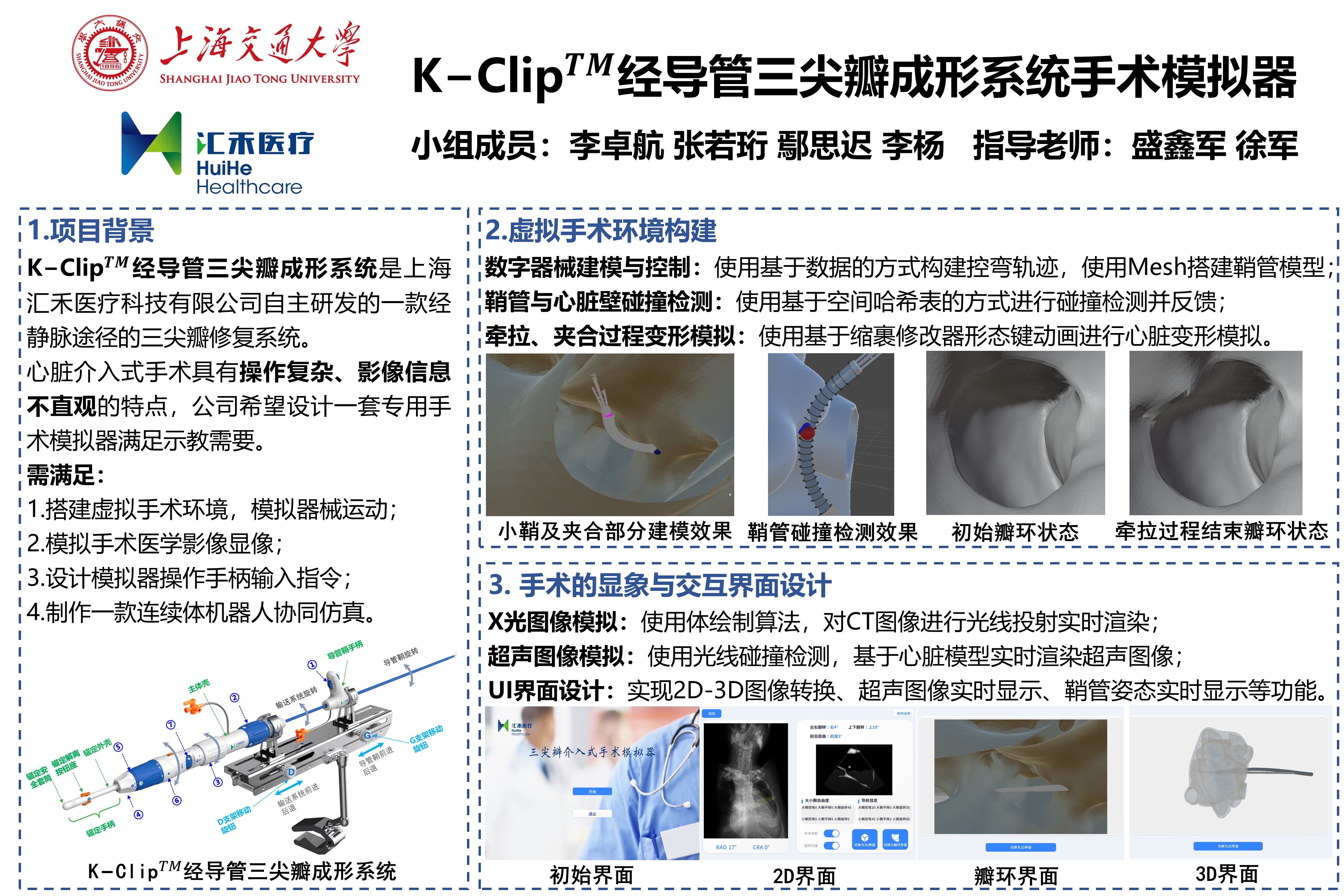
心脏介入手术过程复杂,操作难度高,手术状况获取需查看医学影像,医生会受到辐射影响。为了降低医疗器械操作培训成本与风险,本项目基于汇禾医疗K-Clip™器械设计了一套专用的手术模拟系统,以满足心脏瓣膜手术的示教与培训需求。
该系统中,在模拟DSA、TEE图像的引导下,使用者通过控制模拟器配套的硬件手柄,对在虚拟环境中的数字器械模型各自由度进行控制,模拟手术操作,同时可通过连续体机器人姿态直观观察鞘管的状态。
项目目标
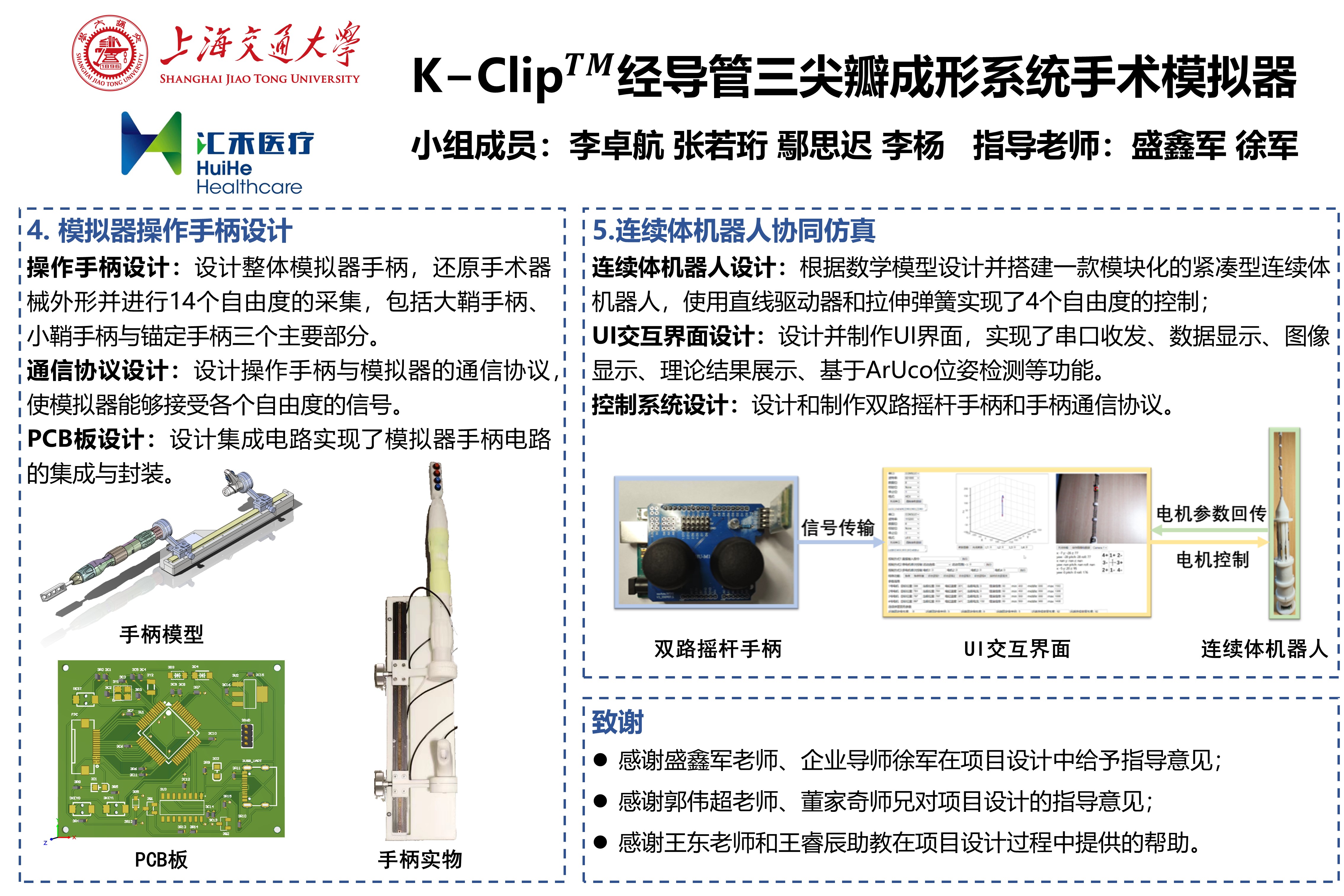
设计模拟器配套的操作手柄。其操作模式与汇禾公司K-ClipTM经导管三尖瓣成形系统保持相对一致,手柄应能够感知各自由度运动,将指令传递给软件模拟器。
开发手术模拟器软件与图像界面。手术模拟器能够接收配套手柄输入的指令,在软件中完成手术过程中主要环节,并提供反馈。运行过程在用户界面实时显示模拟手术过程的X光、超声影像,并允许医生调整操作模拟仪器的运动,切换不同视角。
因此设计连续体机器人与手术模拟器进行协同仿真,以展示器械复杂实时形态。
项目成果
完成虚拟手术环境的搭建与配套外部手柄、联合仿真连续体机器人的开发与初步功能实现。实现了手柄内部硬件各个传感信号进行采集,并将信号发送给虚拟手术环境;在手术环境部分,使用手柄传递的信号控制虚拟手术环境中手术器械各自由度运动,实现了器械与手术环境的交互设计;在显像界面部分,基于CT数据生成人体X光图像,基于心脏模型生成心脏超声图像,与手术环境中的器械模型叠加,实现了实时术中影像显示;在联合仿真部分,将术中鞘管运动的姿态信息发送给绳驱动连续体机器人,控制连续体机器人的运动,展现手术器械中的大小鞘管弯曲姿态。




