

配电室应急操作机器人
机械工程资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
企业导师: 吴俊生

指导教师: 张伟军
项目成员: 唐雨晗、邵振磊、刘阳
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
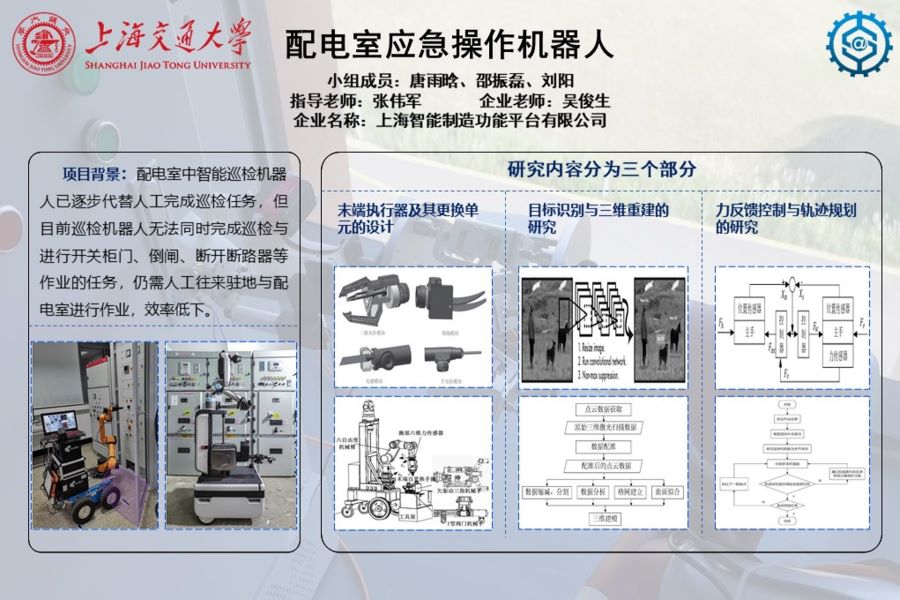
近年来,伴随着经济的不断发展以及智能电网概念的提出,智能巡检机器人已逐步代替人工完成电网巡检任务,但目前应用的巡检机器人无法同时完成巡检与进行开关柜门、倒闸、断开断路器等作业的任务,仍需人工往来驻地与配电室进行作业,效率低下。本项目旨在设计一款搭载六轴机械臂的具备自主作业能力与遥操作功能的机器人,其能够对配电室的电力器件进行标识并进行路径规划,完成抄表、故障检测等巡检作业,同时能通过遥操作的方式控制机器人完成开关柜门、倒闸、断开断路器等复杂作业。
项目目标
1. 根据机器人在巡检中的开柜门、倒闸等作业的力,位置要求,设计相应的末端执行器以自动化地完成相应作业任务。
2. 完成电柜元器件的目标识别,实现巡检机器人对环境的语义分割;完成对识别目标的定位,获取三维位姿;完成对变电柜的unity-3d三维重建
3. 对从端机械臂进行轨迹规划,实现应急情况下自主完成倒闸、开柜门等复杂操作的功能,搭建主从遥操作力反馈系统,实现力反馈功能与末端导纳控制功能。
项目成果
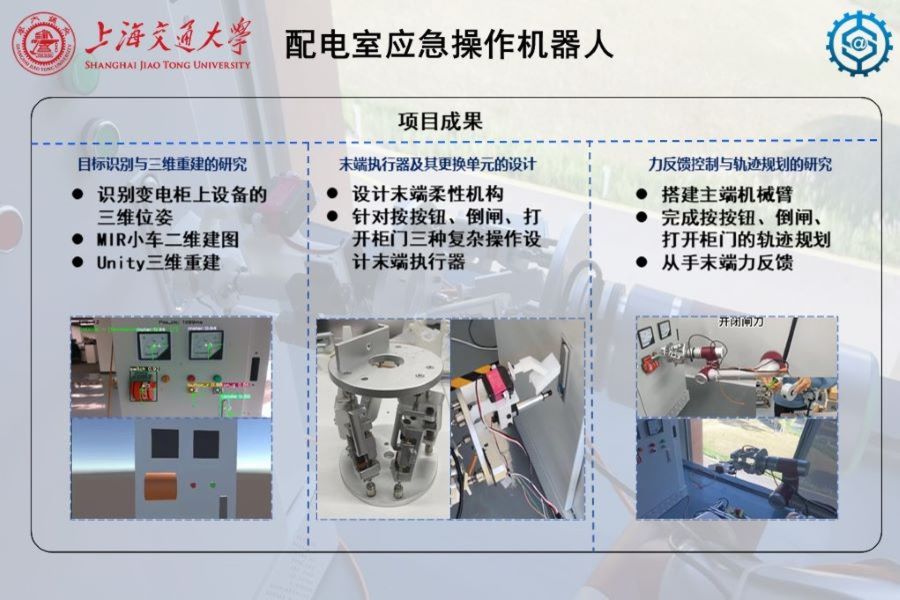
设计了一款六自由度被动柔顺平台,实现了对机械臂末端反作用力的调控;完成了开柜门末端执行器的设计与制造;完成了拉闸刀末端执行器的设计与制造。
搭建了电力柜设备三位位姿目标识别系统,实现了对电力柜上仪表、闸刀、门锁等目标的三维位姿识别;完成MIR小车二维建图;完成基于Unity 3D配电室环境三维重建。
搭建了用于主从遥操作的1:2主臂;设计了主从遥操作从臂力反馈系统;完成了机械臂进行拉闸刀、开柜门操作的轨迹规划。




