

机器视觉+雷达农业机器人对行作业系统设计
机械工程资助企业:
 山东联诚农业装备有限公司
山东联诚农业装备有限公司
企业导师: 蒋磊

指导教师: 李彦明
项目成员: 曹博 刘畅 罗隽聃 李广达
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
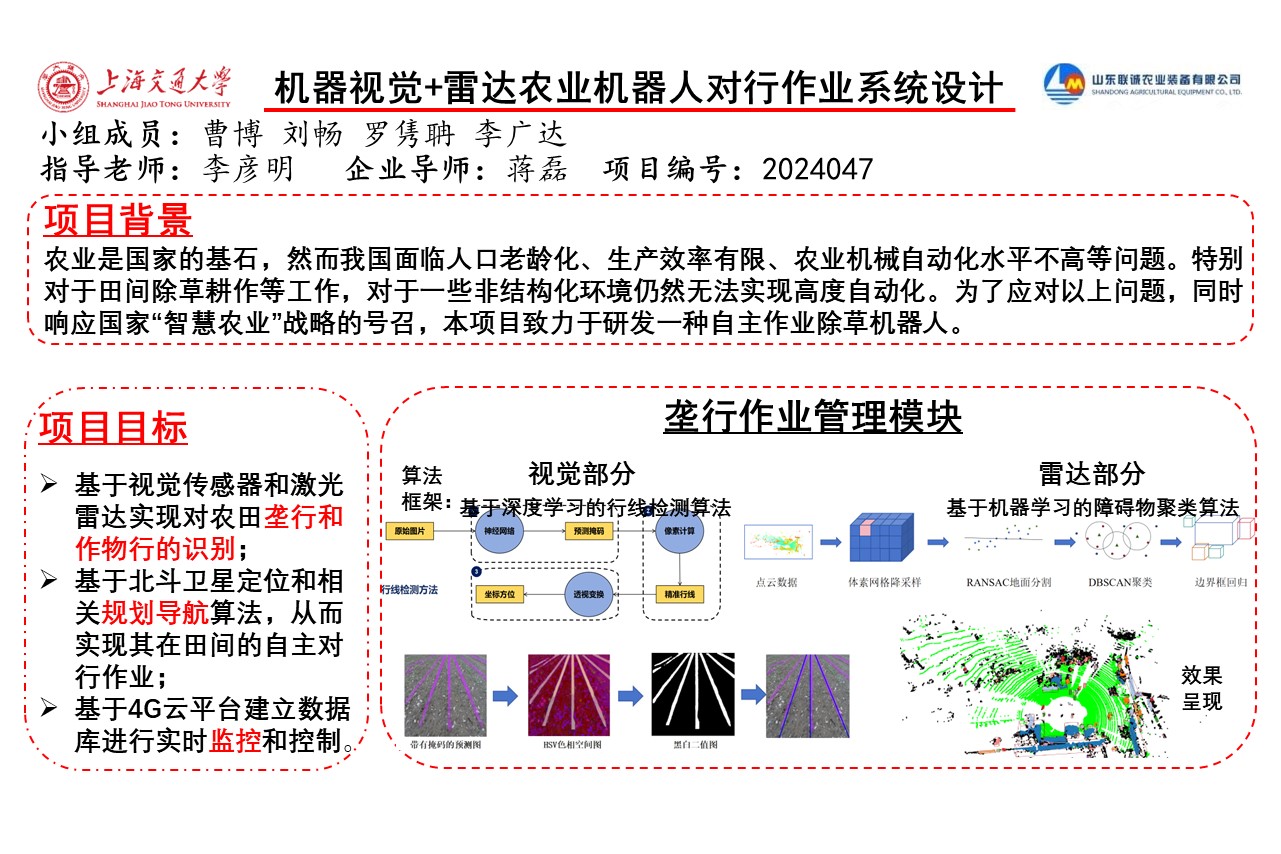
本项目致力于开发一种高度自动化的农业机器人,结合机器视觉与雷达技术,专门用于解决农业领域的除草耕作问题。该机器人针对非结构化的农田环境,通过整合先进的视觉传感器、激光雷达(LIDAR)、北斗卫星定位系统以及4G云平台技术,不仅能够提升作业效率和精度,还能显著减少对人工的依赖。此外,项目的开展还响应了国家对智慧农业发展的战略需求,旨在推动农业生产自动化和信息化的进程。
项目目标
1、环境感知与作物识别: 本项目的核心在于运用机器视觉和激光雷达技术,精准识别农田中的垄行和作物行,提高作业的准确性。
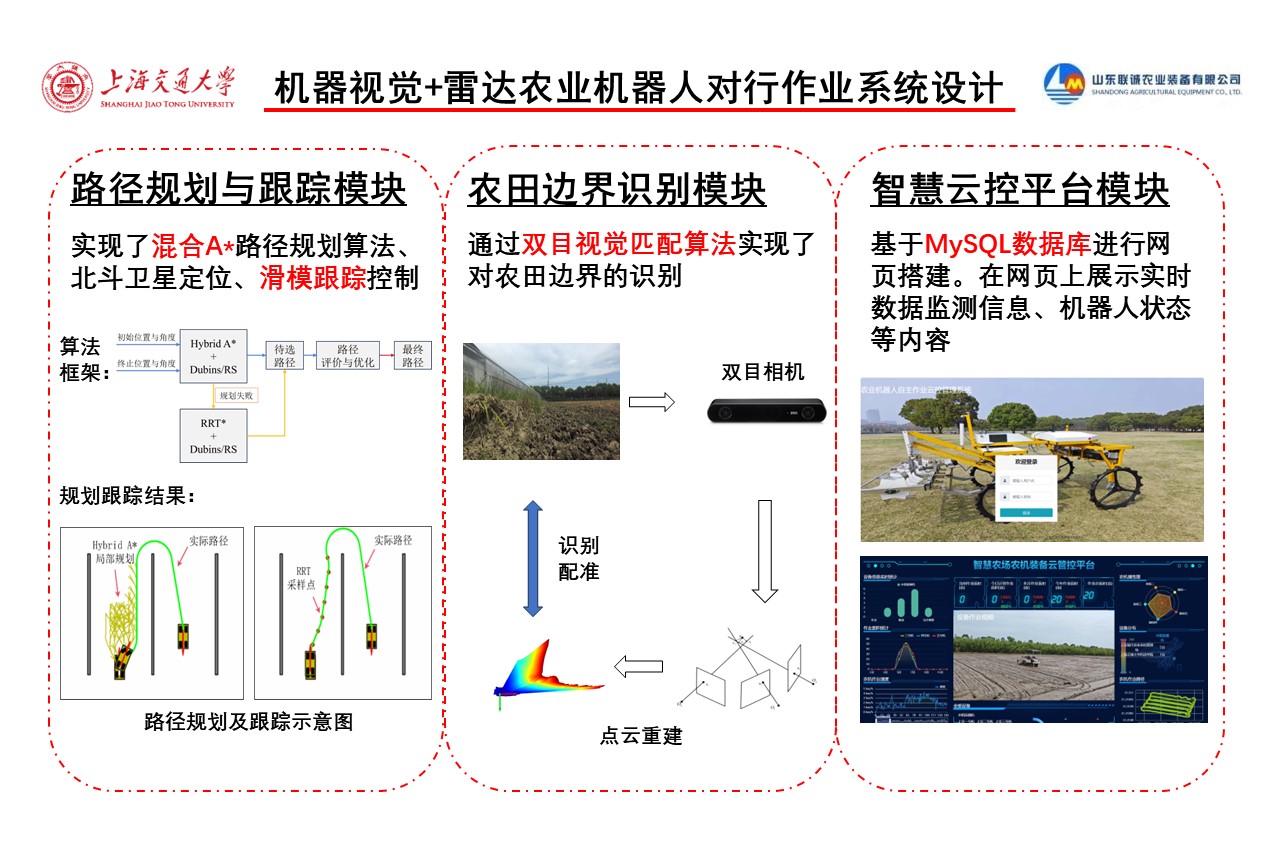
2、自主导航与作业: 通过混合A*路径规划算法和北斗卫星定位技术,实现机器人在复杂农田环境中的自主导航和精确作业,从而优化作业路径和提高作业效率。
3、智慧监控与数据管理: 建立一个基于4G云平台的数据管理和监控系统,实时监控作业过程,收集作业数据,进行数据分析,以支持决策制定和作业流程的持续优化。
项目成果
1、技术实现与应用: 项目成功开发并整合了基于深度学习的行线检测算法和基于机器学习的障碍物聚类算法,提升了机器人在田间作业的智能化水平。
2、作业效率和精度的提升: 通过实现农田边界的自动识别及非结构化环境下的精准除草作业,显著提升了农业生产效率和作业精度,减少了资源浪费。
4、监控与控制平台的建设: 开发了一个基于MySQL的智慧云控平台,不仅能在网页上实时展示数据监控信息和机器人的工作状态,还能提供操作者以直观的管理界面,增强了作业的可控性和透明度。




