

协作机器人刀具钝化柔性修磨系统的设计
机械工程资助企业: 上汽大众汽车有限公司
企业导师: 薛飞

指导教师: 许黎明
项目成员: 孙滔、刘昊灵、刘儒梁
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
刀具刃口钝化主要是在形成刀具刃口的两平面相交处,产生可控的半径或棱面,以及改善刀具表面光洁度,以提高刀具刃口强度,减少摩擦并有利于排屑,对提高刀具使用效率和零件加工质量具有重要意义。目前已经有很多学者针对刀具刃口的钝化修磨开展了研究工作,但在实际生产过程中,企业还是以手工钝化为主,并且钝化时的工艺参数主要还是依赖于操作人员的手感和一定范围内的推荐值,没有形成完整的钝化参数数据库。
项目目标
本项目将基于企业对刀刃钝化修磨的需要,研发一款协作机器人刀具修磨设备,并完成以下目标:
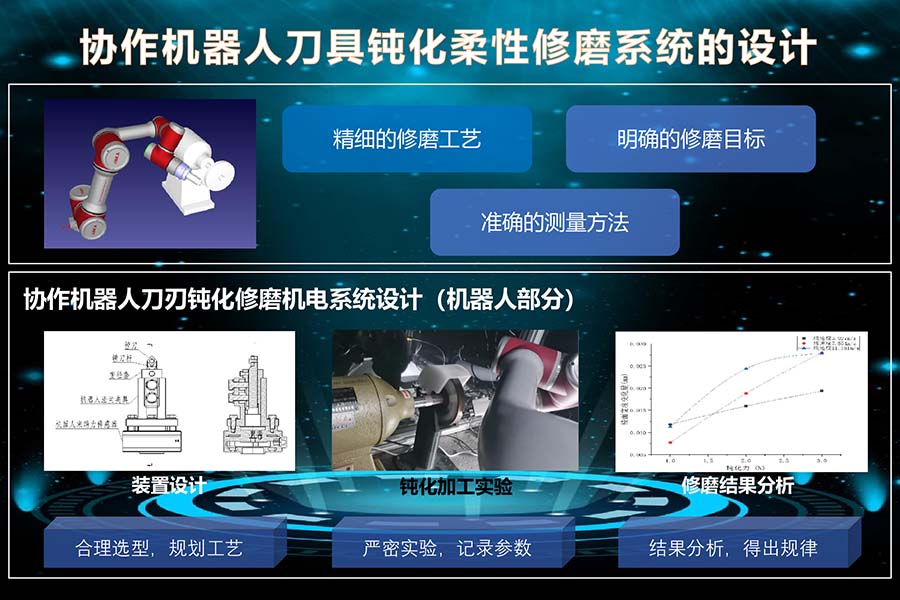
(1)设计一套机器人刀具刃口钝化修磨装置,包括协作机器人和末端夹具系统设计、钝化修磨单元选型和设计。
(2)完成机器人钝化修磨的轨迹规划和轨迹控制算法。
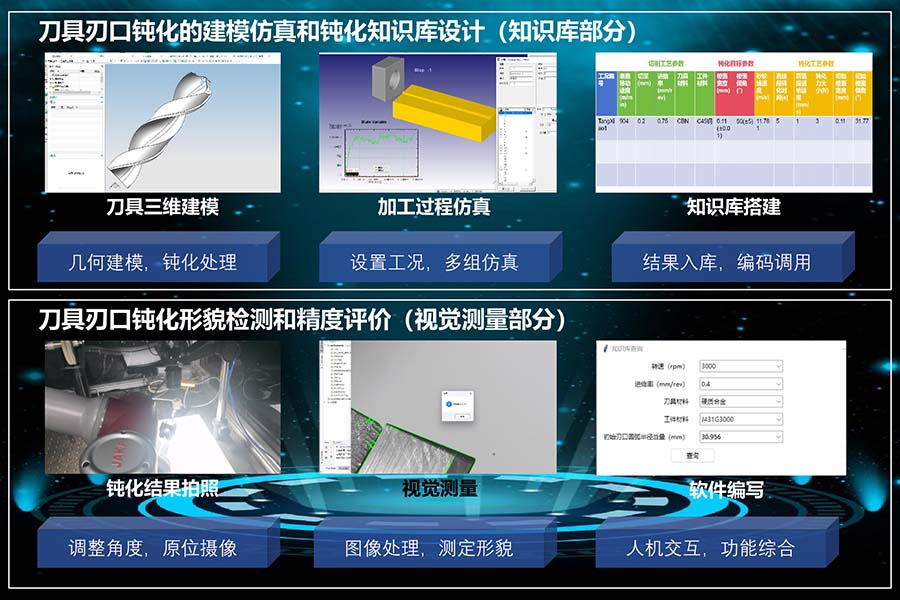
(3)完成刀具刃口钝化的建模和切削过程仿真。
(4)完成镗刀钝化参数知识库和钻头钝化参数知识库的设计。
(5)完成机器人钝化参数图像检测系统的设计。
(6)完成机器人修磨系统的软件设计。
项目成果
本项目完成了机器人刀具刃口钝化机电系统设计、刀具刃口钝化的建模仿真和钝化知识库设计、机器人钝化参数图像检测的原理和系统设计,基本完成了既定项目目标。确定了在与企业给定工况相近的情况下,CBN镗刀与硬质合金麻花钻的最佳钝化形貌、将刀具修磨至最佳钝化参数的钝化工艺,完成了修磨结果的测量。根据实验结论,将钝化各类参数收录到钝化知识库中,编写了机器人修磨系统软件以进行数据的调用或补充。




