

基于电触觉和虚拟现实技术的灵巧手触觉反馈与重建
机械工程资助企业: 上海念通智能科技有限公司
企业导师: 刘朝旭

指导教师: 盛鑫军
项目成员: 许晨荃、董家奇、王方彤
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
本项目立足于解决科研用灵巧手成本过高以及商用灵巧手感知与反馈能力欠缺的重点问题,扩展商用灵巧手的感知和反馈功能,促进推动灵巧手感知领域的keyan成果向民用转化。本项目面向灵巧手参与的人机虚拟现实交互训练场景,以SJT7机械手为平台基础,期望建立基于电触觉反馈和虚拟现实技术的感知与交互系统以实现触觉信息的反馈通路,实时观测、反馈与重建灵巧手与实际物体的交互信息,并能够应用于机器人遥操作以及残疾人假肢训练等具体问题。
项目目标
本项目旨在实现以下目标:拓展机械灵巧手的前端力位感知能力,实现对抓握过程中的接触力、关节角度以及交互物体信息进行感知;电触觉反馈模块能够对于灵巧手的前端传感器数据以及用户的控制意图,通过适当的电触觉反馈编码策略实现触觉信息的反馈,传递人机交互过程中的力触觉和本体感;设计用于与灵巧手交互的虚拟现实平台和上位机模块,虚拟现实平台可以实现对灵巧手的抓握过程进行重建,上位机界面可以显示灵巧手触觉信息和电触觉反馈策略控制。
项目成果
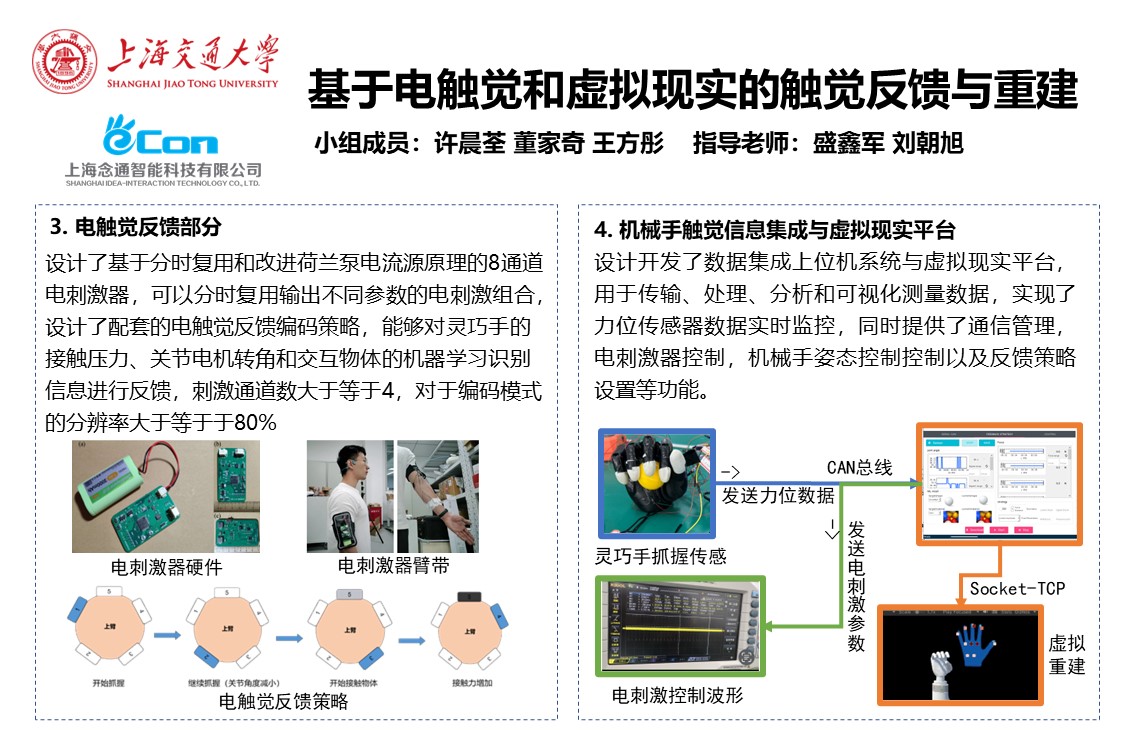
灵巧手前端部分设计实现了能够同时采集并传输10个压力传感器信息和3个电机角度信息的混合感知系统,并建立了一个含有 2 层隐藏层的神经网络来实现对8种抓握物体的识别;电触觉反馈系统设计实现了基于分时复用和改进荷兰泵电流源原理的8通道小型化电刺激器以及配套的电触觉反馈编码策略,能够对灵巧手的接触压力、关节电机转角和交互物体的机器学习识别信息进行反馈;开发了数据集成上位机系统与虚拟现实平台,用于传输、处理、分析和可视化测量数据,实现了力位传感器数据实时监控,同时提供了通信管理,电刺激器控制,机械手姿态控制控制以及反馈策略设置等功能。




