

小空间抹灰装置的智能定位设计
机械工程资助企业:
 上海蔚建科技有限公司
上海蔚建科技有限公司
企业导师: 班猛飞

指导教师: 徐锦泱
项目成员: 徐林锋,张晓明,蒋晨艺
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
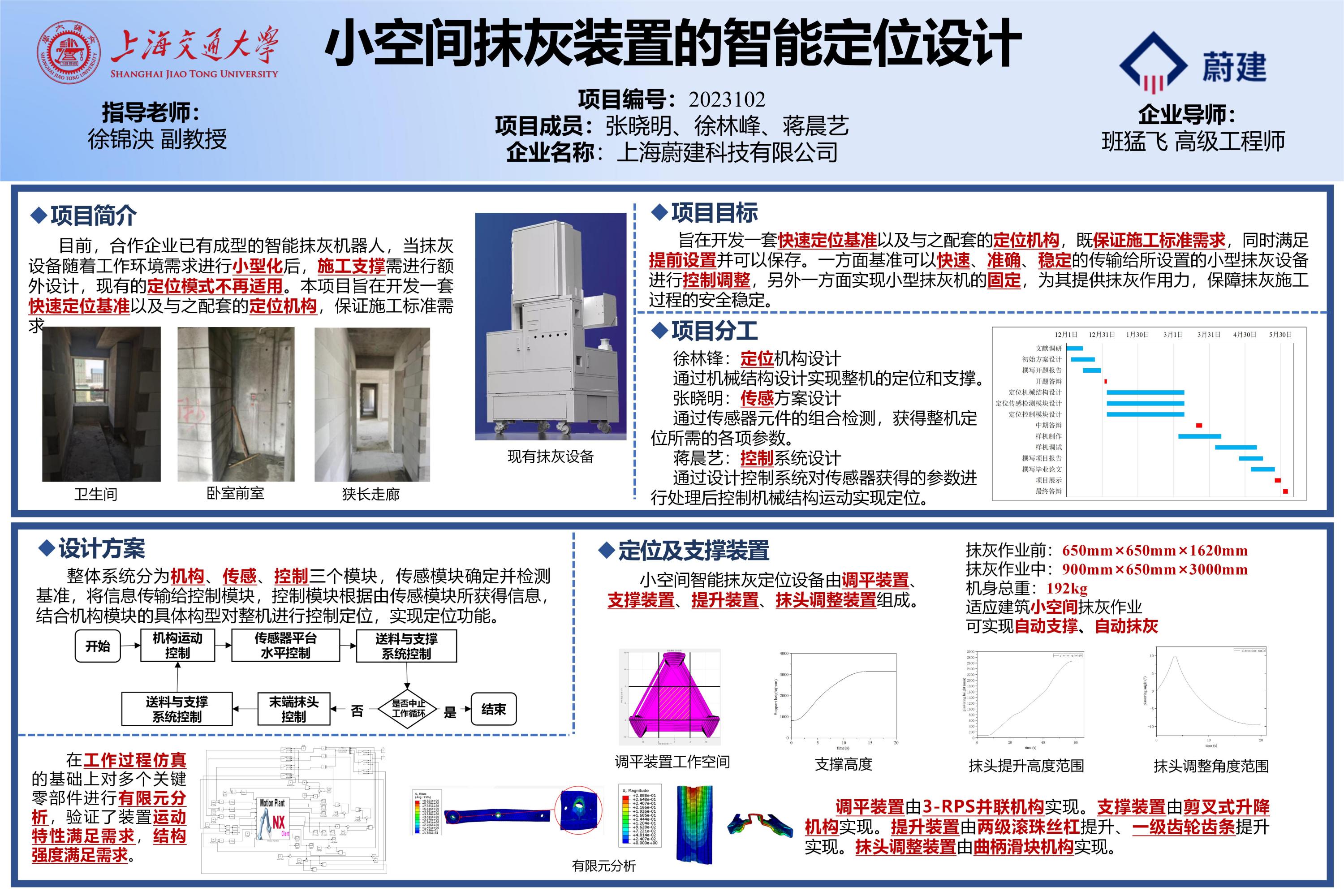
目前市面上的全自动抹灰机器人已经可以实现在宽敞的室内空间完成大型墙面的抹灰工作,但是部分狭小空间区域(如卫生间、走廊、阳台等)仍然施工困难,尚需人工完成抹灰作业。但人工抹灰的效率低、成本高,不利于规模化和高效化施工。
本项目基于小空间抹灰装置的定位需求,结合机构、传感、控制三个方面开发一套人机协作的智能定位系统以及与之配套的施工支撑模块,以达到准确定位、轻便易携带以及安全稳定的墙面抹灰施工需求。
项目目标
本项目旨在开发一套可以快速定位基准以及与之配套的定位机构,既保证施工标准需求,同时满足提前设置并可以保存。在保证抹灰成型面达到方正性及厚度在5-15mm之间的施工标准同时,保证此基准线可以且必须提前设置,贯穿施工的前中后期,保存直到抹灰施工完成。一方面基准可以快速、准确、稳定的传输给所设置的小型抹灰设备进行控制调整,另外一方面实现小型抹灰机的固定,为其提供抹灰作用力,保障抹灰施工过程的安全稳定。
项目成果
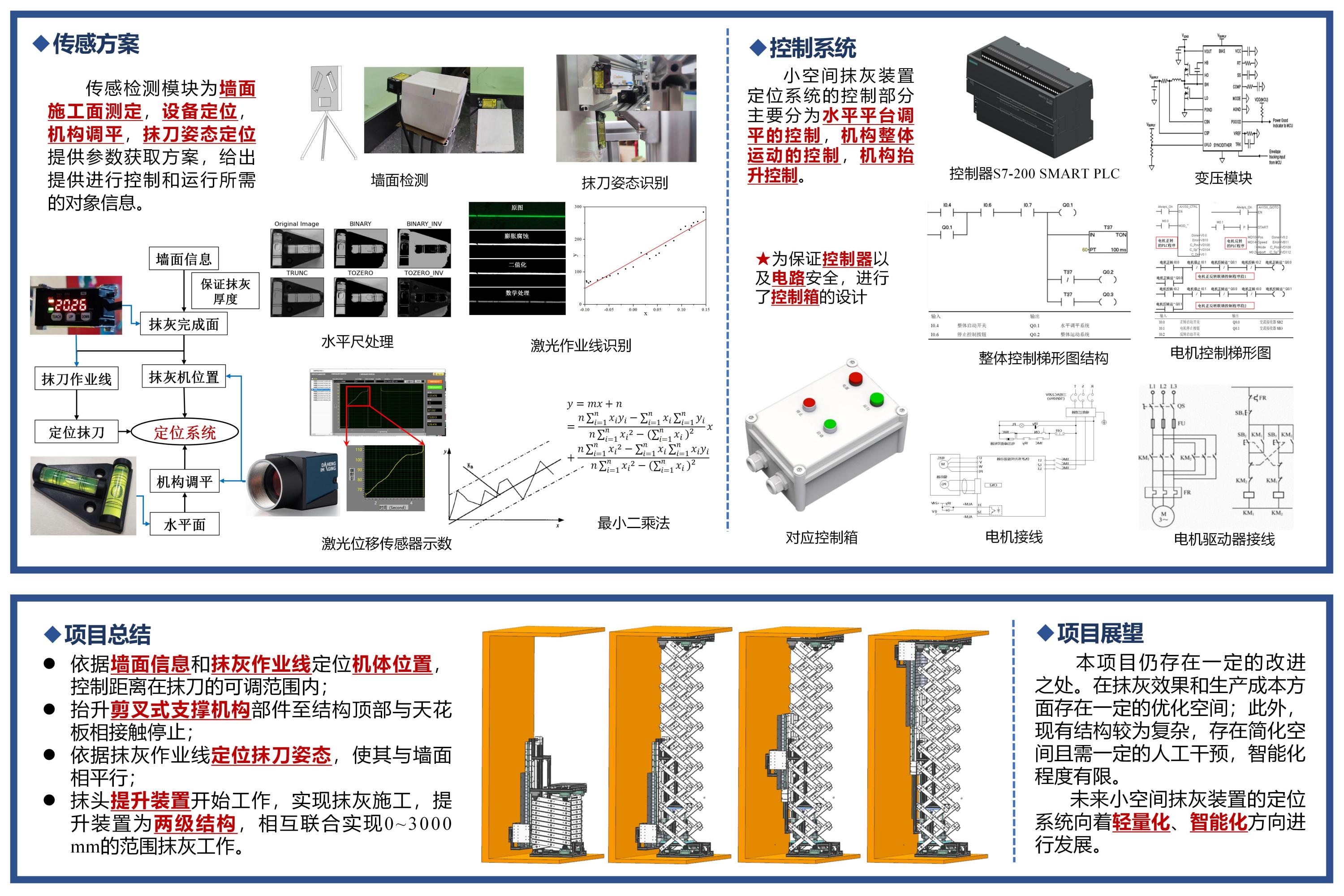
本项目组成员完成了小空间抹灰装置定位系统的整机设计。该定位系统主要包含5个功能模块:(i)通过检测墙面信息生成作业线调整万向轮实现整机移动定位;(ii)通过水平尺的水平标定调整3-RPS机构实现平台调平;(iii)通过剪刀式结构控制机构高度顶住天花板实现整机支撑;(iv)通过多级提升实现抹头提升;(v)通过测距传感器检测实现抹头调整。最后,由控制系统获得传感器参数实现整机的结构控制。本项目结合有限元仿真、传感器参数校准、控制模块设计,通过定位工作流程模拟和样机搭建实验,最终验证了项目设计方案的可行性,实现了小空间抹灰装置智能定位的整机设计与搭建。




