

智慧路网系统自动驾驶小车控制系统设计
机械工程资助企业: 弗祐机器人科技(上海)有限公司
企业导师: 杨明伦

指导教师: 黄宏成
项目成员: 刘亚杰、王寅泰、史萧訸
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
现今汽车技术正朝着“智能化、网联化、电动化、共享化”新四化方向发展,智能汽车是指通过搭载先进传感器、控制器和执行器等装置,使用互联网、大数据、人工智能等新技术,具备部分或完全自动驾驶功能的新一代汽车,本项目拟开发一款能够在路网系统中实现自动驾驶的1/16ROS智能小车,使其能够通过自身传感器和处理器,实现自动驾驶的功能,同时能够将小车运动信息和检测到的道路信息显示出来,为中学生搭建智能驾驶科创实践平台。
项目目标
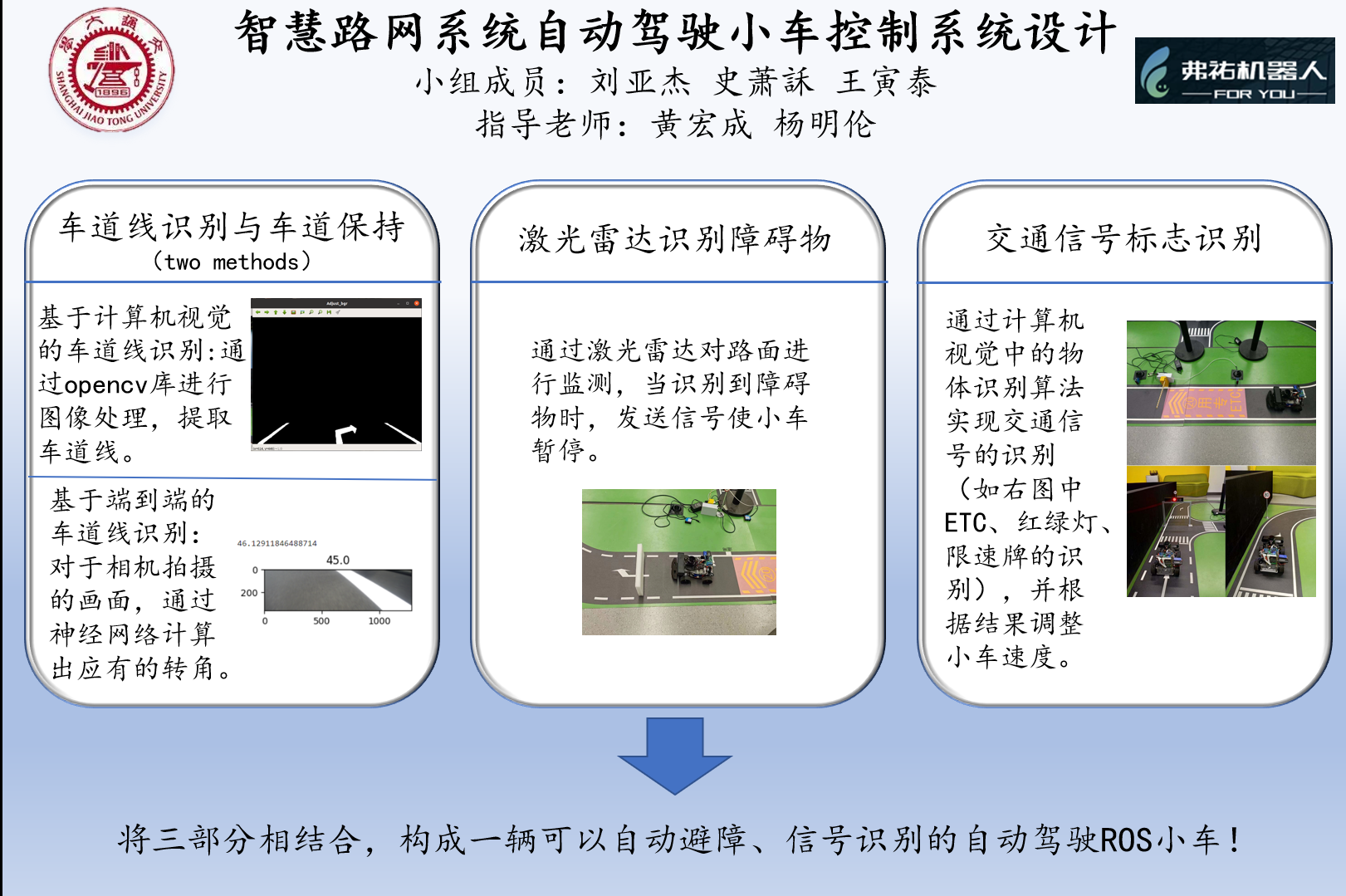
为了能够使ROS小车能够在模型中实现自动驾驶功能,本项目的主要功能将分为以下三大部分:一,实现车道线识别,是小车能够根据车道线的走向调整小车前进方向,从而使小车沿着车道线行驶;二,识别道路中包括红路灯、限速标、ETC通道、斑马线在内的道路交通信号,并能够根据识别到的交通信号调整小车速度;三,实现道路模型的2D建图,在设定好若干目标点之后,使小车能够依次到达这些位置,同时检测道路中的障碍物并上传信号。
项目成果
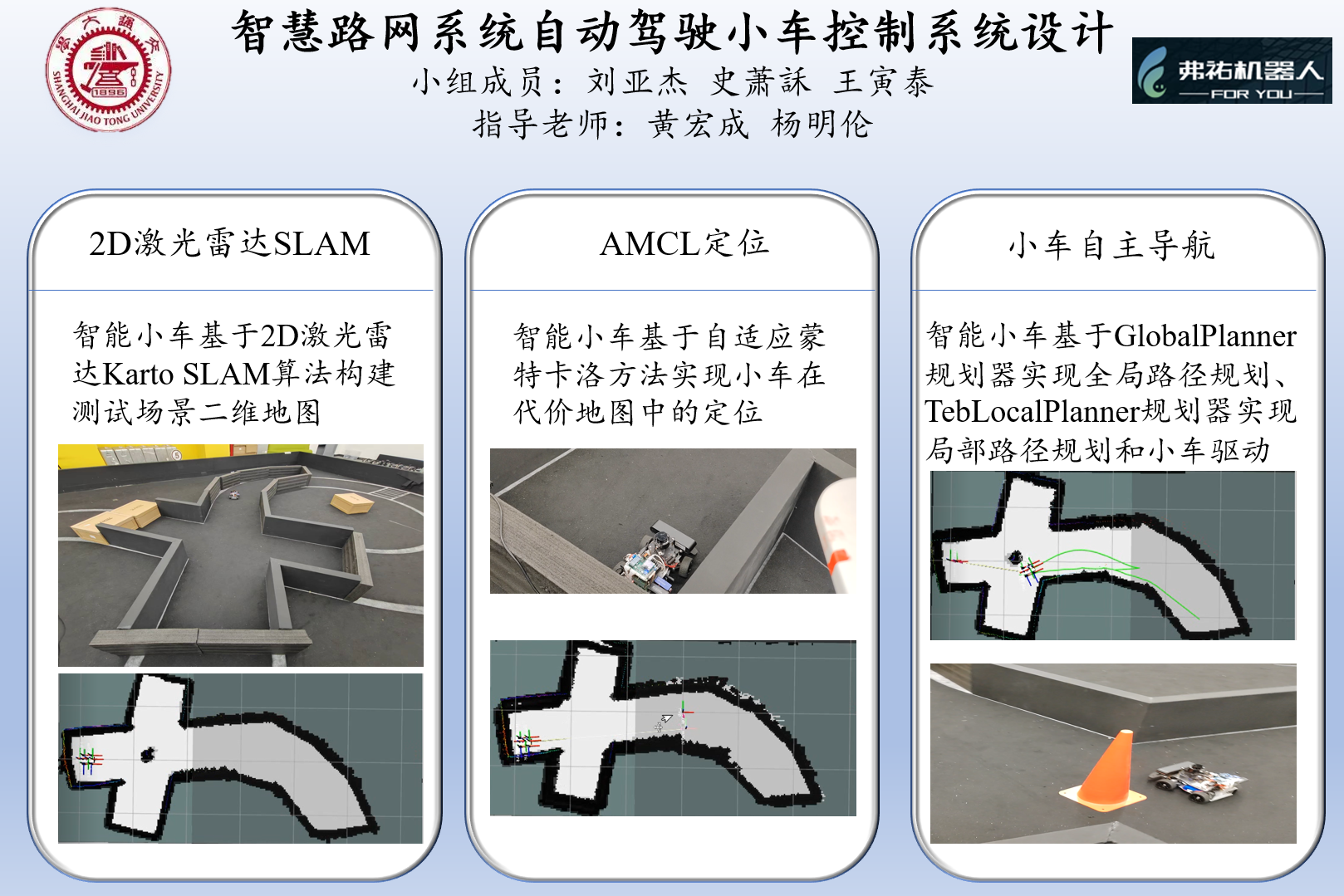
最终小车能够完成以下任务:一,通过视觉识别获取道路车道线的位置和走向,不断调整前进方向,小车能够在车道线内行驶;二,通过计算机视觉中的物体识别算法实现道路中交通信号的识别,并根据识别到的信号调整小车速度,例如识别到红灯停下来,识别到ETC通道加速通过;三,通过激光雷达SLAM技术实现跑道周围环境的建图,显示小车当前位置,并能够完成不同位置之间的路径规划,同时检测道路中的障碍物,当识别到障碍物时使小车停止运动。




