近日,必赢线路检测中心张文明教授团队在Advanced Functional Materials上发表了题为“Hierarchically Reconfigurable Soft Robots with Reprogrammable Multimodal Actuation”的研究论文,针对软体机器人首次提出了一种分级可重构的策略,并通过仿真、理论和实验揭示了弹性引导的多模式运动机理。该设计策略克服了以往模块化软体机器人运动模式不可改变的缺陷,将模块化的设计方法提升到了更高的维度。论文第一作者是博士生房付熠,通讯作者是张文明教授和同济大学航空航天与力学学院李汶柏研究员。
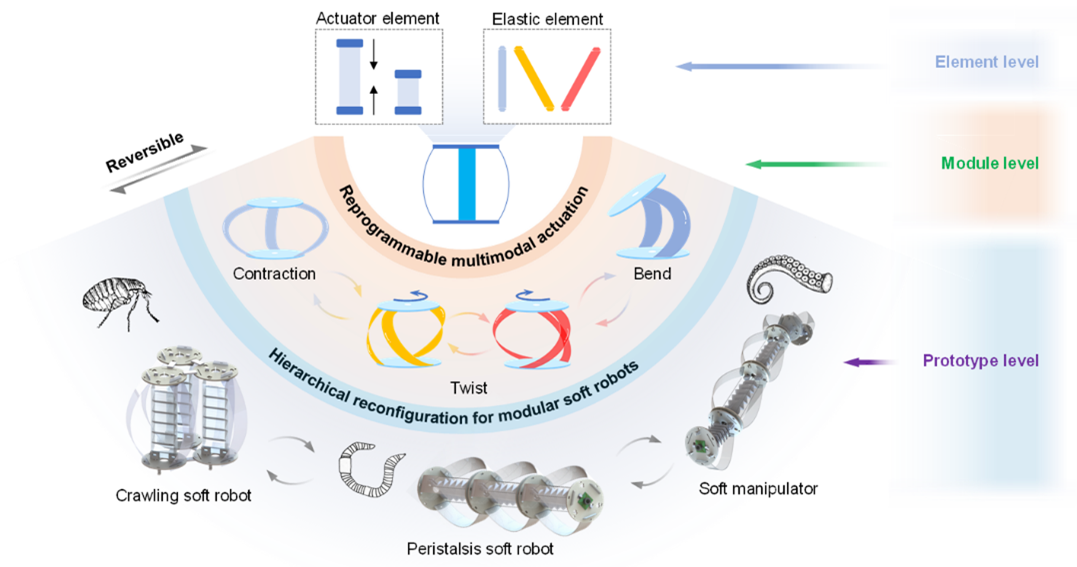
可重构软机器人在应对复杂环境和多变任务时表现出卓越的灵活性和适应性。然而,传统的可重构设计策略是基于特定结构和有限运动模式的软体模块,其可重构性或可扩展性受限。针对该问题,研究团队提出了一种分层可重构策略,不仅具备传统模块化机器人的功能,即通过模块间的组合构建不同的机器人,还能通过重编程模块内的弹性引导元件,实现模块的多种运动模式。
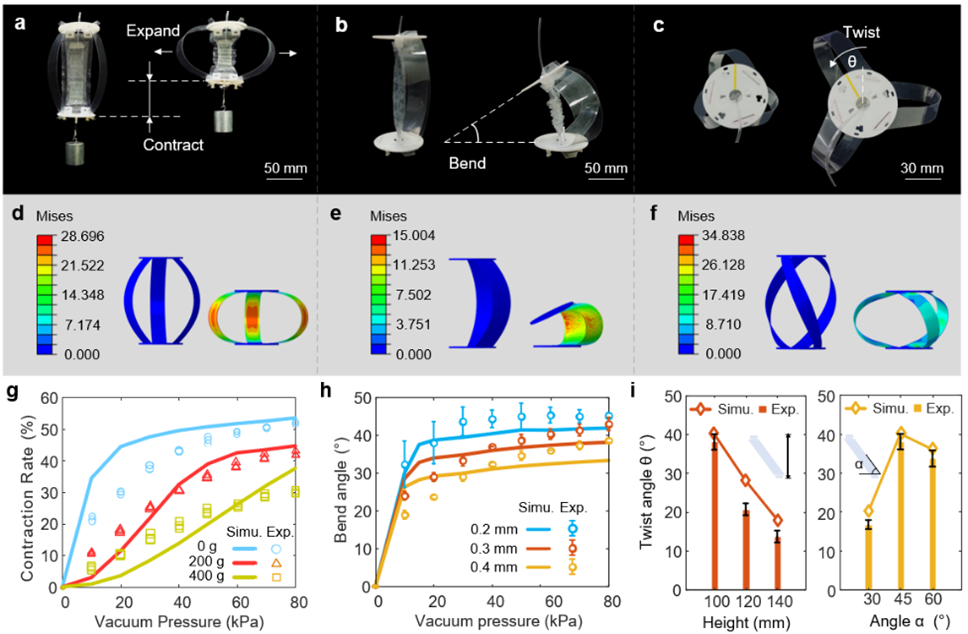
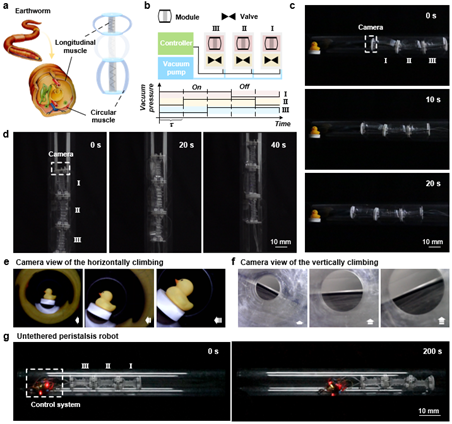
团队对收缩、弯曲、扭转三种基本的运动模式进行了仿真和实验研究,分别关注了负载以及弹性梁的尺寸参数对驱动性能的影响,并建立了设计参数与输出性能之间的联系,为软体模块的逆向设计提供了基础。利用这些模块,团队构建了仿蠕虫机器人、平面全向移动机器人、多模式机械臂等应用样例,其中,仿蠕虫机器人实现了无缆操作和摄像头搭载,为长距离管道探测提供了可能;多模式机械臂经过模块运动模式的重编程,实现了物体传递以及跨障碍探测等功能。

该研究得到了国家自然科学基金项目、机械系统与振动全国重点实验室项目、中央高校基本科研业务费项目、上海高校IV类高峰学科建设的资助。论文合作者还包括上海交通大学陈虎越、郭欣宇博士和孟光教授。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202414279
