
近日,首届中国机械行业卓越工程师教育联盟“恒星杯”毕业设计大赛决赛举行,我院钱学森班学生林成靖获大赛金奖。本次大赛学院共推选5项作品,均获佳绩:
首届“恒星杯”毕业设计大赛由中国机械工程学会和中国机械行业卓越工程师教育联盟共同主办,以提高学生解决工程问题的能力和展现学生创新为宗旨,要求参赛项目与企业工程实际相结合。大赛共收到248项毕业设计作品,经145名高校和企业专家审查函评,评选出金奖1项,银奖3项,铜奖10项,优秀奖15项和佳作奖73项。
参加大赛的我院学生均来自2017届毕业班,他们是学院近年来开展产学合作平台、项目式教学与课程项目展等本科教学系列改革的首批受益者。学生从一年级开始尝试在课程中解决工业企业以及人们现实生活中的工程问题,并通过项目式的教学方式训练团队精神、创新思维及交流表达能力。每学期学院定期组织课程项目成果展,邀请企业及高校的专家、知名校友等对项目进行指导和评审,为学生提供了交流展示的平台,激发学生创造力,提高学生综合工程实践能力。
附 获奖项目介绍:
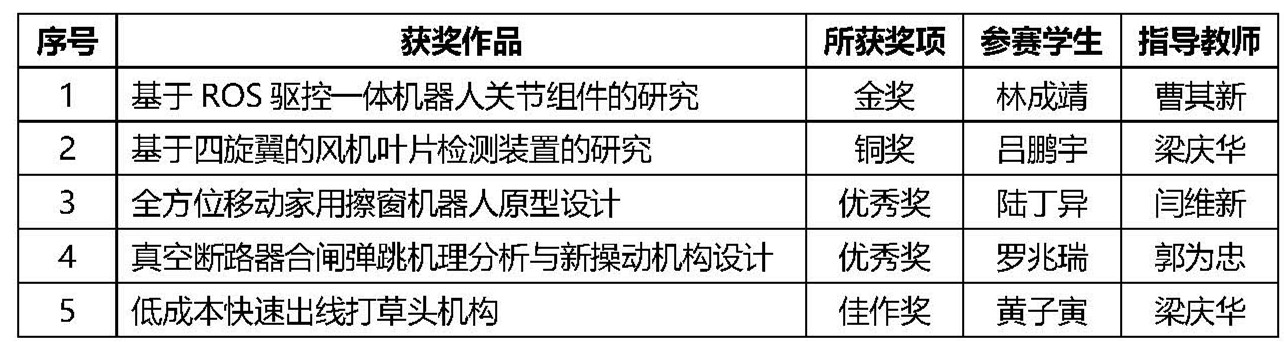
金奖:《基于ROS驱控一体机器人关节组件的研究》
参赛学生:林成靖,指导教师:曹其新
目前,市场上的机器人采用固定的机械结构,互不开放的控制系统和设计思路阻碍了机器人的普及,而模块化和组件化被公认为解决以上问题的最有效方法。本课题开发的多种驱控一体的机器人关节组件可自由组合成特定构形。组件化体现在机械结构、电子电气、控制算法、上位机软件的通用性,通讯使用CAN/EtherCAT总线,软件采用ROS技术,配合人机交互界面的使用,方便二次开发。通过关节组件自由组合,用户可快速搭建机器人并编程控制,拓展服务、工业、医疗等领域应用。
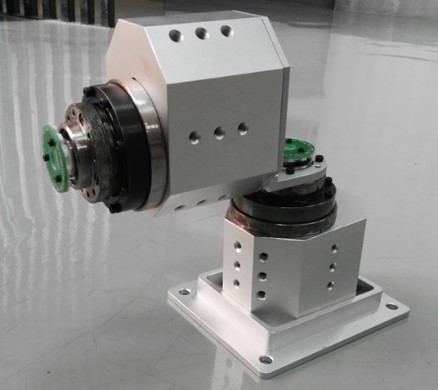
铜奖:《风机叶片检测四旋翼自适应着陆装置设计》
参赛学生:吕鹏宇,指导教师:梁庆华
针对风机叶片检测困难的问题,该项目设计了一种基于四旋翼的载体平台,可以搭载相应的检测装置对风机叶片进行接触式检测。整机轻量化设计,可搭载0.5千克的检测设备进行工作。系统结构上分为动平台、静平台和推杆。创新性地使用3-UPU并联机构,由动平台与静平台的交替吸附,实现了系统的爬行运动和扫描运动。从功能上,系统分为飞行模块、运动模块、检测模块和辅助模块,目前已完成运动飞行模块与运动模块的设计与加工。
优秀奖:《全方位移动家用擦窗机器人》
参赛学生:陆丁异,指导教师:闫维新

该项目旨在研究一款适合高层住户和大型窗户清洁用的擦窗机器人,较市面上的同类产品,擦窗效率更高,清洁效果更优秀,同时强调更高的安全性。主要通过以下几个方面实现:(1)分为内机和外机两个部分,同时对窗的内外面进行擦洗,提升擦窗效率;(2)通过设置异形永磁体,将机器人牢牢吸附于窗面;(3)内机使用全方位Mecanum轮,外机使用万向轮,无需改变运动姿态,实现无盲点擦窗;(4)通过制作Android平台的APP,实现移动客户端对机器人的状态监控和移动控制。
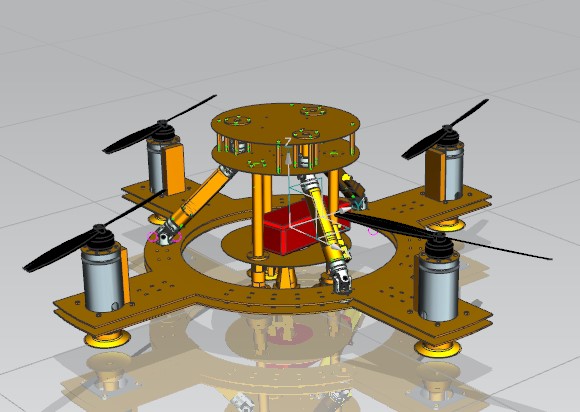
优秀奖:《真空断路器合闸弹跳机理分析与新操动机构设计》
参赛学生:罗兆瑞,指导教师:郭为忠

近年来,国家大力发展各级电路电网,但电网中的高压断路器的工作可靠性还不尽如人意,高压断路器发生的故障已经严重危害电网安全,特别是其中的合闸弹跳问题成为了国内外的行业性难题。本文针对合闸弹跳问题进行了机理分析,建立了合闸弹跳的碰撞模型并讨论了各种影响因素;同时以某型40.5kV真空断路器为研究对象,建立了其能量流动及分配路径,从能量分配的角度分析出该机构中影响合闸弹跳的四个关键环节;对整个合闸系统建模分析,并提出四个改进方案,通过仿真和实验两种方式验证新设计。
佳作奖:《低成本快速出线打草头机构》
参赛学生:黄子寅,指导教师:梁庆华
传统敲地式打草头存在着操作复杂、劳动强度大、磨损严重、机器负载损伤大、无法控制出线长度等问题。本项目致力于改进打草头出线方式,设计出一款新型自动出线打草头装置:根据打草绳的长度来控制工作转速,从而影响离心飞重所提供的离心力,替代了现有产品所需的巨大敲击力。本新型打草头装置可自动出线,减轻机器磨损程度;可设置不同的出线转速,适用于多种类型的割灌机;可定长出线,保证最佳切割长度。
