
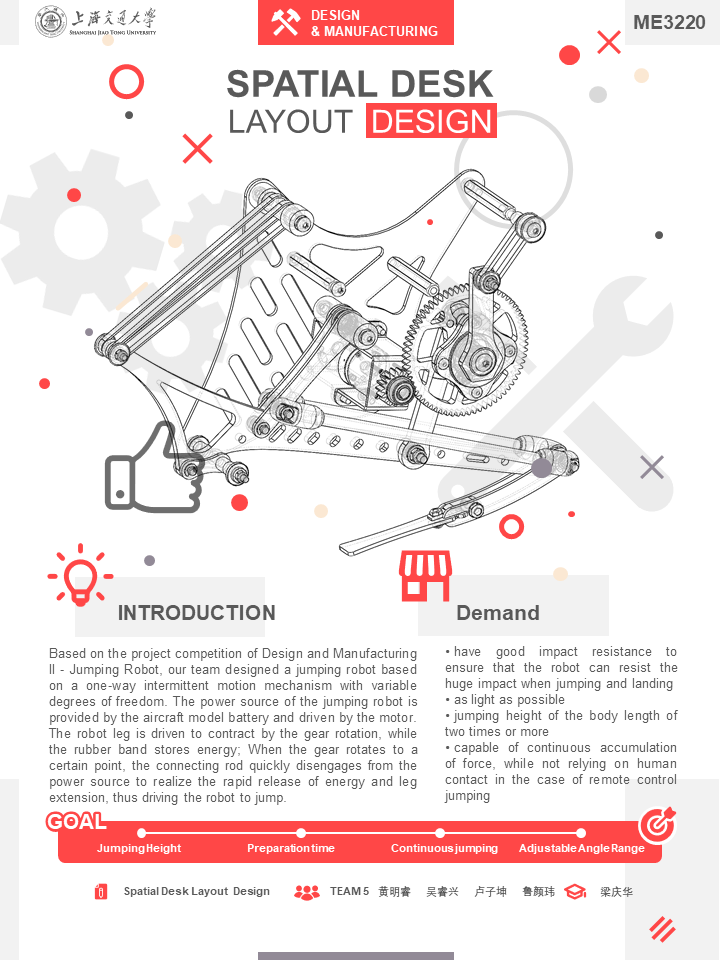
基于设计与制造Ⅱ课程项目所设置的项目挑战赛——跳跃机器人,本组设计了一种基于变自由度单向间歇运动机构的跳跃机器人。该跳跃机器人动力源由航模电池提供,由电机驱动,通过齿轮旋转带动机器人腿收缩,同时橡皮筋蓄力储存能量;当齿轮旋转至某一点后,连接杆迅速与动力源脱啮合,实现能量的迅速释放和腿部伸长,进而带动机器人实现跳跃。同时利用辅助橡皮筋,降低了电机最大负载。机器人重新落回地面后,仍可以继续由电机带动蓄力。同时,基于ESP32控制板,实现了利用蓝牙在手机进行远程遥控跳跃的功能。
1. 具有良好的抗冲击性,以保证机器人能抵抗起跳和落地时巨大的冲击力
2. 重量尽可能轻,控制在600g以内
3. 跳跃高度达到身体体长的2倍及以上
4. 能够进行连续的蓄力,同时在不依赖人接触的情况下远程遥控起跳
5. 外观美观大气,具有科技感
1. 本组设计了变自由度单向间歇运动机构,实现了缓慢储能和快速释放的功能;同时利用辅助弹簧补偿法,优化电机最大载荷。
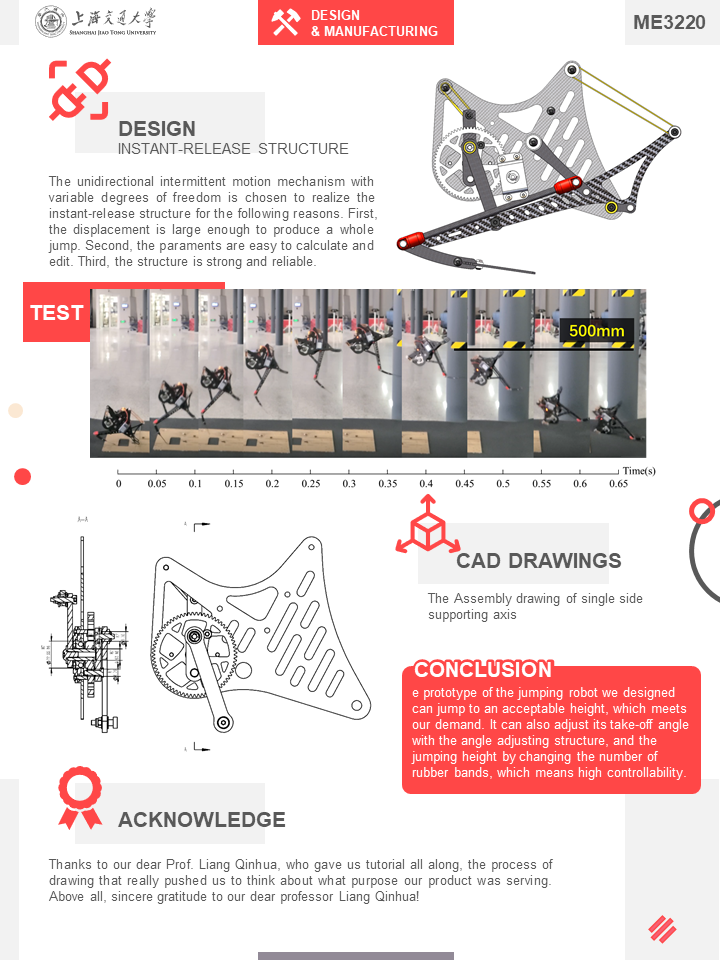
2. 跳跃机器人能够实现连续蓄力,同时最大跳跃高度达到50cm,为身体体长的2.5倍。
3. 机身多处采用碳纤维复合材料与7075铝合金,保证了机架具有良好的抗冲击性和刚度。
4. 利用蓝牙功能,实现了远程遥控机器人蓄力与起跳的功能。
5. 机器人外观主体为黑红色,科技感与美观设计兼并。
