
基于项目挑战赛的网球投掷项目,我们组计划设计出一款类网球机器人-高精度定点投掷机器人。经过调研发现,市面现存网球发球机器人普遍价格过高,本项目具有一定竞争能力、低成本利润可观、可连续精准高速投掷等优势。
为了更加清楚我们的目标客户的需求,我们首先设计了问卷,并进行了质量屋、概念设计等分析,然后根据分析的结果对我们的设想进行了丰富和改进。最终在3D模型的基础上,通过3D打印,机加工,激光切割等方式进行了实物的制作,基本实现预期功能。
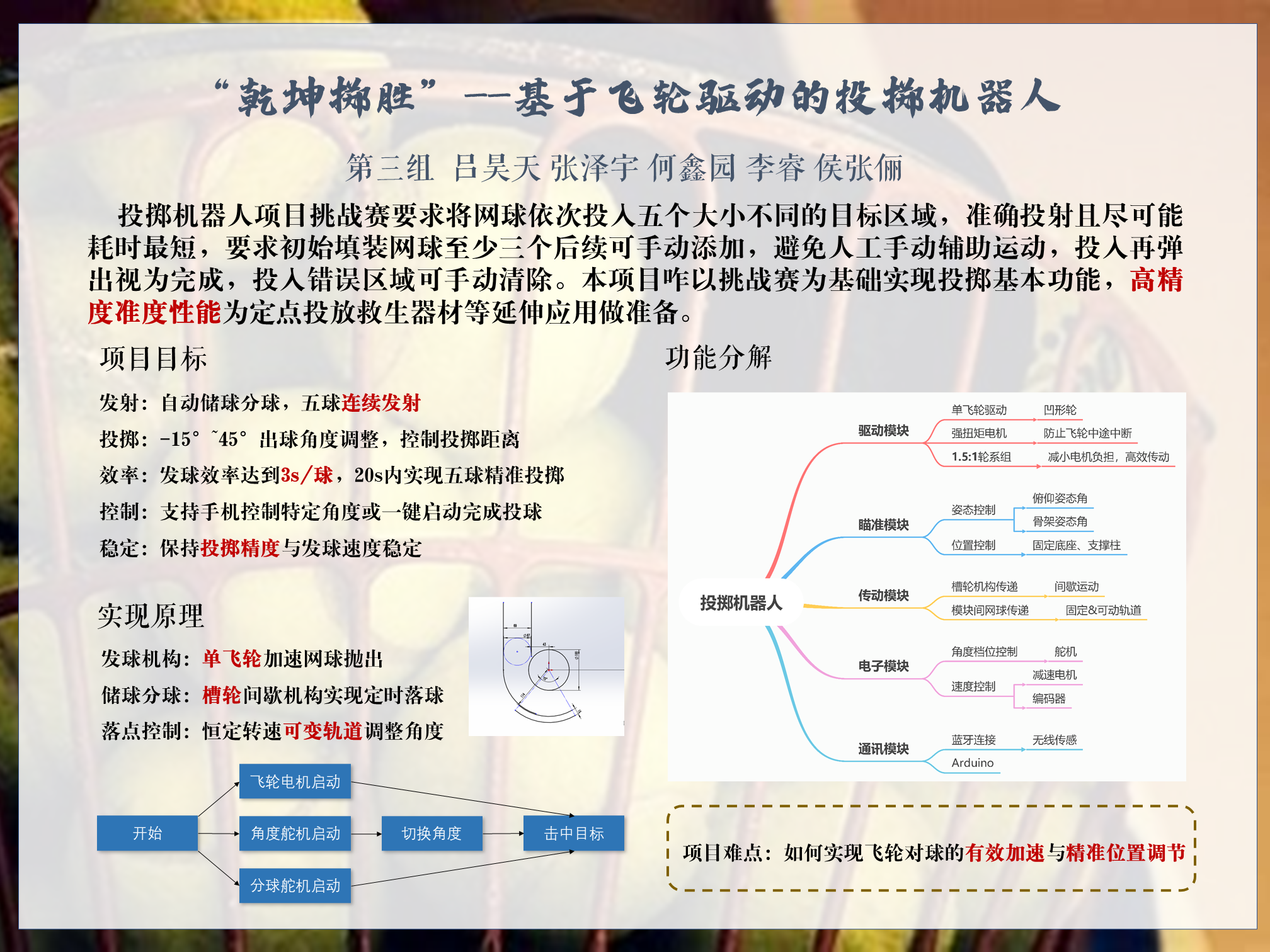
本项目主要包括驱动、瞄准、传动、电子、通讯五大模块,力求功能完整。挑战赛的项目目标是使网球发球机能将网球投掷到五个不同大小的圆形区域,时间越短,精确度越高越好。
在此基础上,我们设计了单飞轮模式以提高稳定性;设计了储球环节实现普适性存球分球;能够至少五球连续发球,通过活动轨道的角度调节控制发球方向;高稳定性,连续投掷过程中保持精度速度稳定;结构简单化,降低成本;利用蓝牙模块与手机相连,做到远程调控。
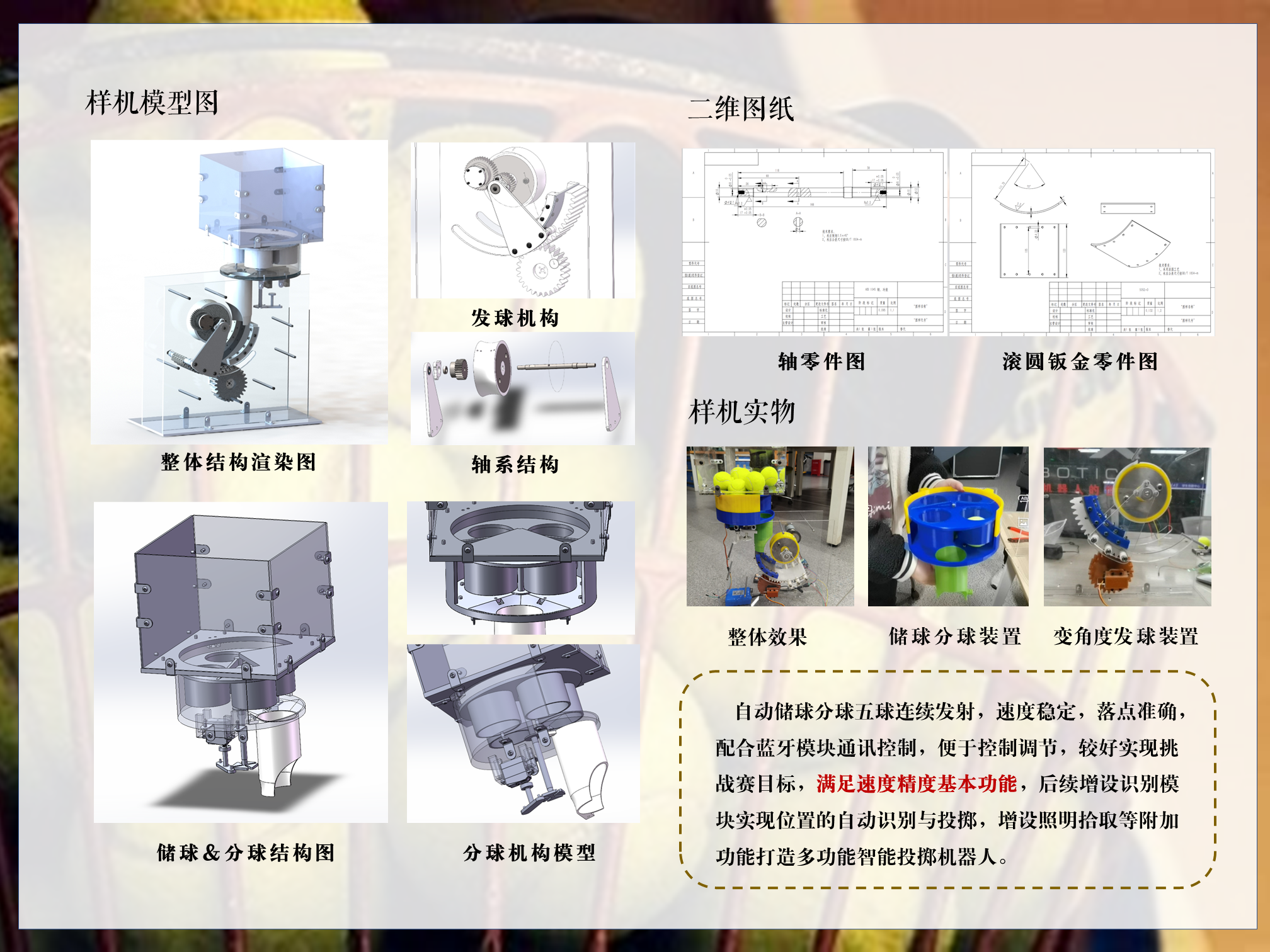
我们完成了整体机器人的设计与开发,虚拟方面我们完成了详细的3D建模、强度校核、运动仿真、模型渲染等方面的工作;实物方面,通过三代样机,最终借助3D打印、激光切割、机加工等方法搭建了最终机器,可以实现五个点位的连续、精准、快速发球;电控方面还可以根据距离更改电机转速,轨道角度等基础参数,以适用于更大范围的网球发射。
