
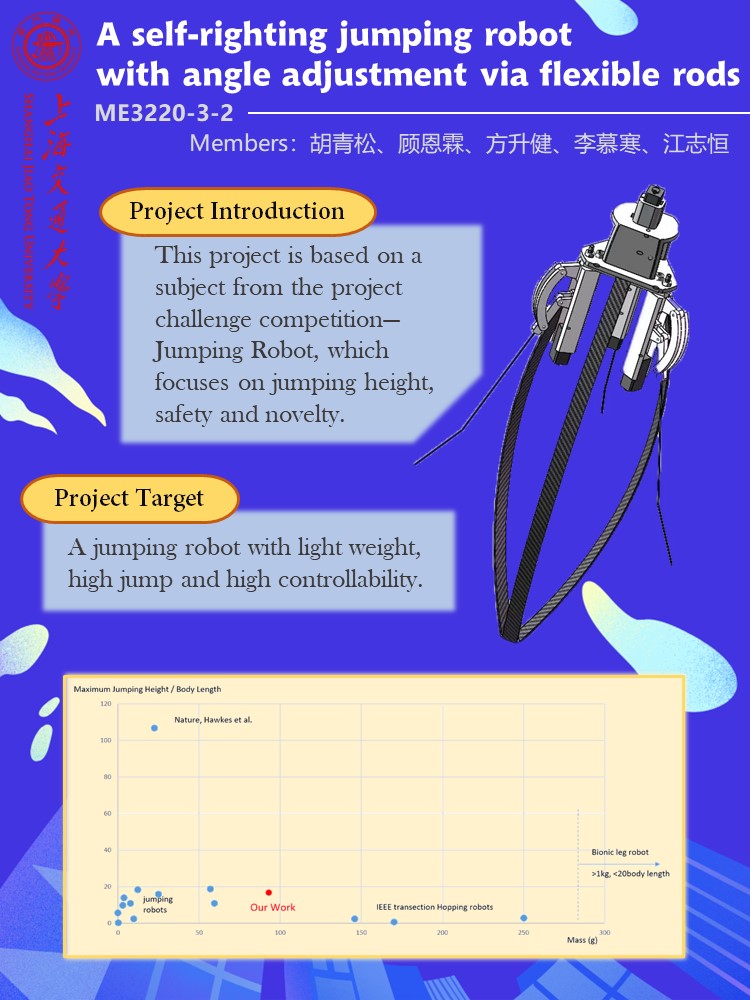
Our project aims to make a jumping robot with self-righting and angle adjustment function.
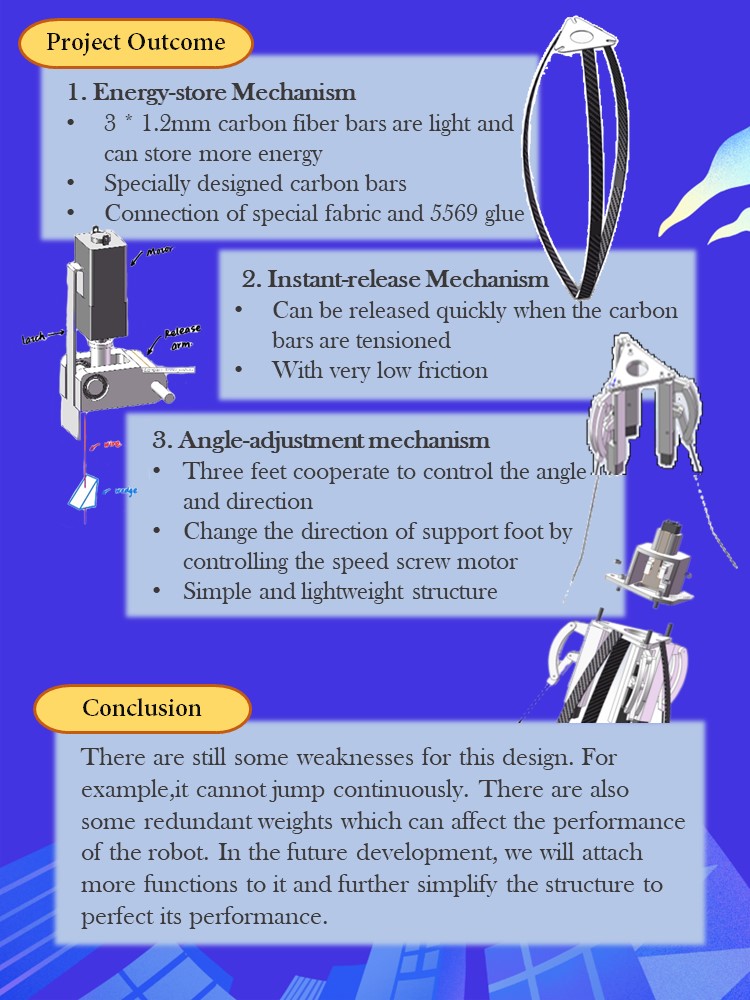
After reviewing 25 articles, we made reference to three of them (Hawkes et al, 2022; Yim et al, 2018; Zhao et al, 2013) and began our detailed design. We used carbon fiber bars to construct the jumping part. With the bending of the flexible carbon rod, it can store a large amount of energy. Besides, we designed a four-bar mechanism to realize the self-righting and angle adjustment function. We also designed an instant-release function for quick energy release.
The final design is shown below. We made a rough prototype during the offline period.
This design weighs about 93g, with an estimated jumping height for about 5.84m. Simulation tests has proved the reliability.
By using the three auxiliary sticks activated though a four-bar mechanism, we can control its position for self-righting and jumping direction controlling (namely the angle adjustment function). However, it cannot automatically tighten the pull wire and bend the carbon bars, which means it cannot repeat jumps without manual aid.
In the future development, we will attach more functions to it and further simplify the structure to perfect its performance.
The objective of our jumping robot includes:
High jumping ability: the jumping height of our robot should be as high as possible. This requires a large energy capacity of our energy storage structure.
Self-righting Function: jumping robots will lie down after falling to the ground, so we aim to make a robot that can automatically adjust itself to up-right position and get ready for another jump.
Instant release: to achieve a satisfactory jumping height, the energy releasing process should be quick. Thus, we should design an instant-release mechanism.
Light weight: jumping robots tend to jump higher with lighter weight. To achieve this goal, we should choose the material carefully and remove redundant weight as much as possible at the structure design stage.
Strength: falling to the ground will exert a large impact on the robot. Our material and structure should be able to bear such impact without mechanical failure. Besides, the power screw transmission and other mechanisms also requires a reliable structure.
Other objectives: long lifetime, controllability, repeatability, low price, small size, short preparation time;
According to our objectives, we drew a QFD chart to verify our need.
Then we drew a diagram to show our target (based on literature review).
We managed to finish the design in SolidWorks. This robot can perform jumping and has angle adjustment function. The preparation time for jumping is less than 30 seconds. However, the robot cannot repeat the jumping process without human aid. Though we managed to realize the self-righting function, the pull wire system for bending the flexible rods requires human adjustment after each jump.
By using the weight calculation function in SolidWorks, the calculated total weight of our robot is about 93g.
We also managed to finish some part of the robot during offline period and have made several tests on its performance.
We drew a force-displacement curve to determine the energy it can store and further retrieved the jumping height.
The estimated energy is 5.32J. Thus, the estimated jumping height is 5.84m. Then we can locate our work in the previous figure:
In conclusion, our jumping robot can jump to a considerable height, while it can also adjust its position with the self-righting unit and jump in a given direction. However, there are still some weaknesses for this design. For example, it cannot jump continuously. There are also some redundant weights which can affect the performance of the robot. There is still large room for improvements.
