
本项目来自于挑战赛项目。挑战赛旨在在规定时间内向指定区域投掷网球。具体来说就是向自左向右直径分别为50 cm,40 cm,30 cm,20 cm,10 cm且间距均为10 cm的目标区域内投掷网球,而评价标准包含完成度、完成速度、项目成本、结构设计等。
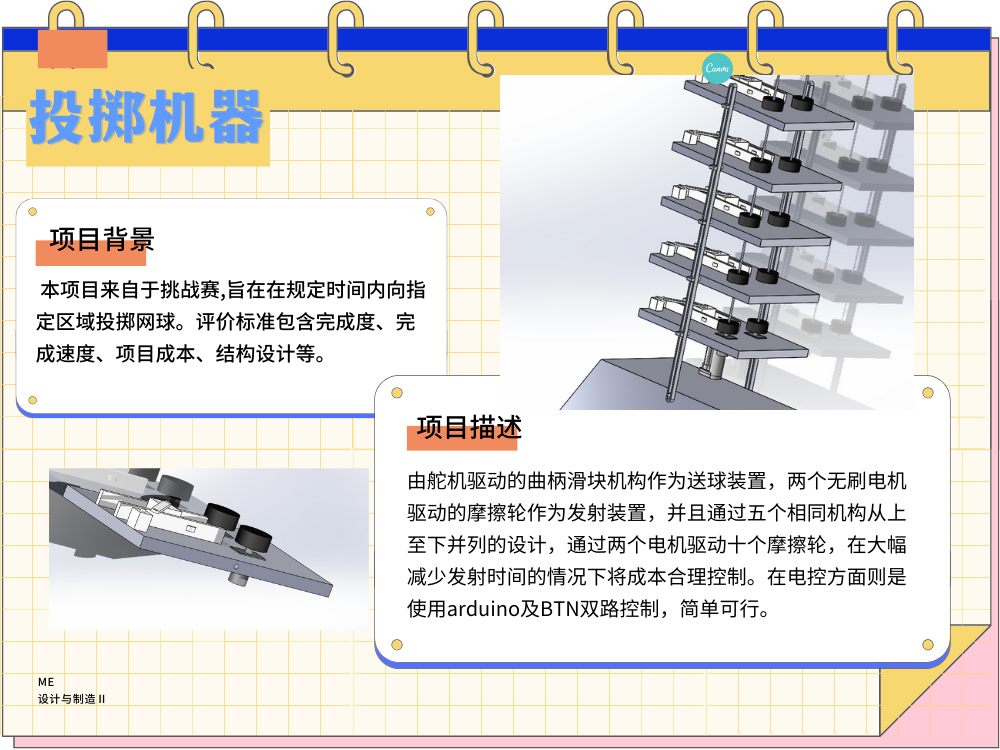
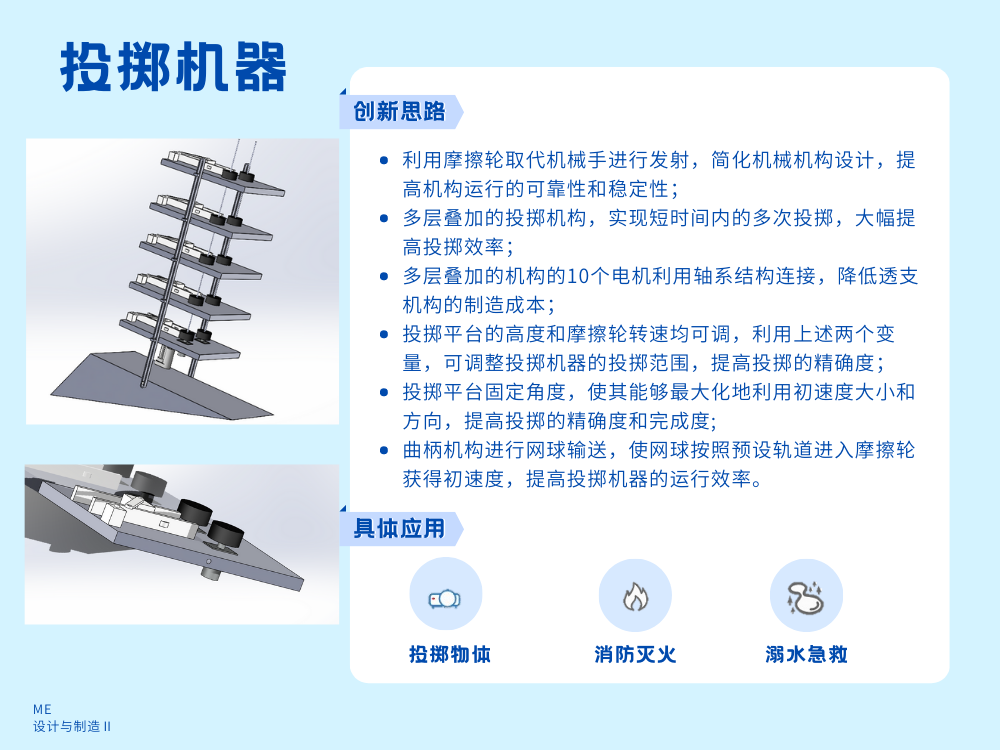
而本项目在综合考虑上述评价标准后选择使用由舵机驱动的曲柄滑块机构作为送球装置,两个无刷电机驱动的摩擦轮作为发射装置,并且通过五个相同机构从上至下并列的设计,通过两个电机驱动十个摩擦轮,在大幅减少发射时间的情况下将成本合理控制。在电控方面则是使用arduino及BTN双路控制,简单可行。
本项目为项目展挑战赛—投掷机器人。
如下图所示,目标区域自左向右直径分别为50 cm,40 cm,30 cm,20 cm,10 cm,各区域间距均为10 cm,矩形范围内为禁止区域;边界用粉笔绘出或用厚度不超过1 cm的胶带围成。
挑战任务:将网球依次投入五个大小不同的目标区域。
挑战赛评价指标:总限时五分钟,五分钟内完成挑战任务的,按完成时间排序;五分钟内未能全部完成挑战任务的,按照完成的区域数量(同等数量下按完成时间)排序。
综合评价指标:总成本、装置机构及结构设计合理性、完整性和创新性;装置可靠性和预期使用寿命(自行分析,考察分析过程合理性和完整性)。
具体来说由于第一评价指标为完成度,第二评价指标为时间,并且在综合考虑其他因素过后本小组选择使用由舵机驱动的曲柄滑块机构作为送球装置,两个无刷电机驱动的摩擦轮作为发射装置,并且通过五个相同机构从上至下并列的设计,通过两个电机驱动十个摩擦轮,在大幅减少发射时间的情况下将成本合理控制。在电控方面则是使用arduino及BTN双路控制,简单可行。
由于疫情原因,本小组仅完成一层的样机模型,经过实际实验发现发射效果重复性好,可控性强,证明本项目有效可行,后续的虚拟样机也经过模拟计算满足挑战赛要求。
