
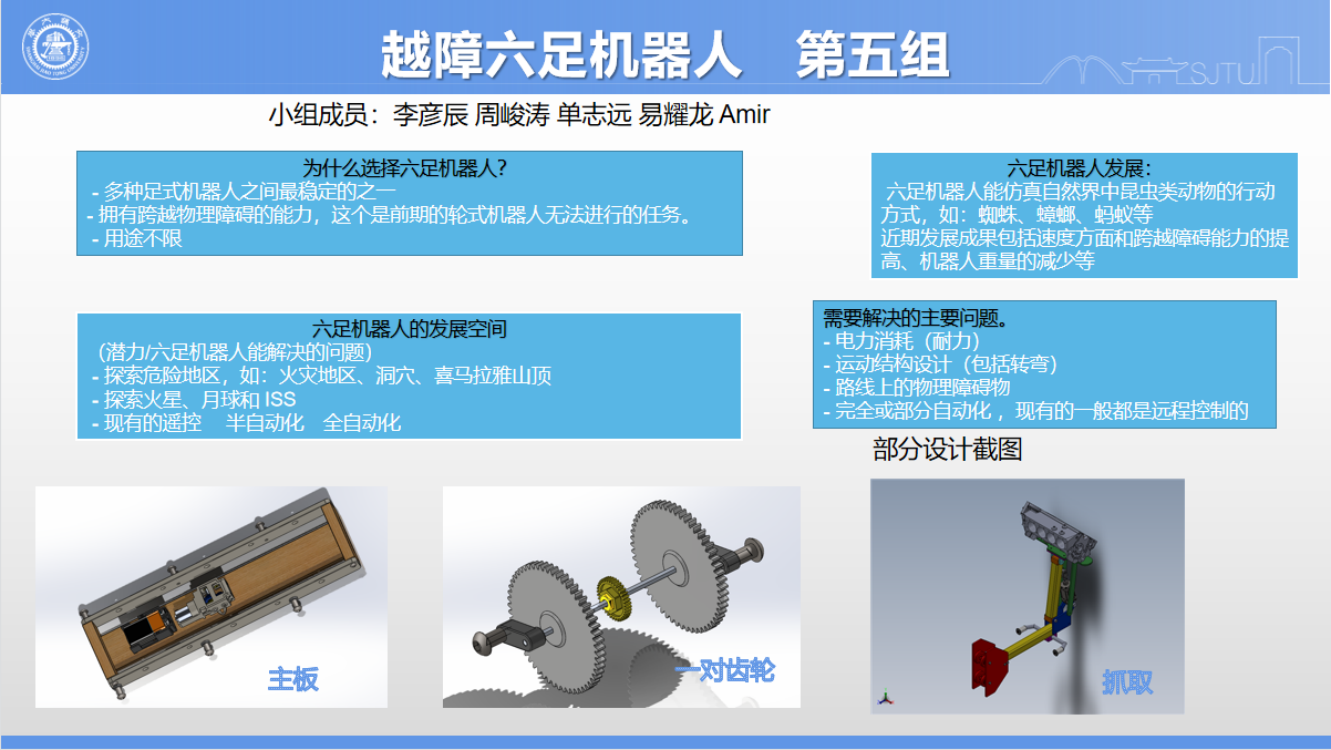
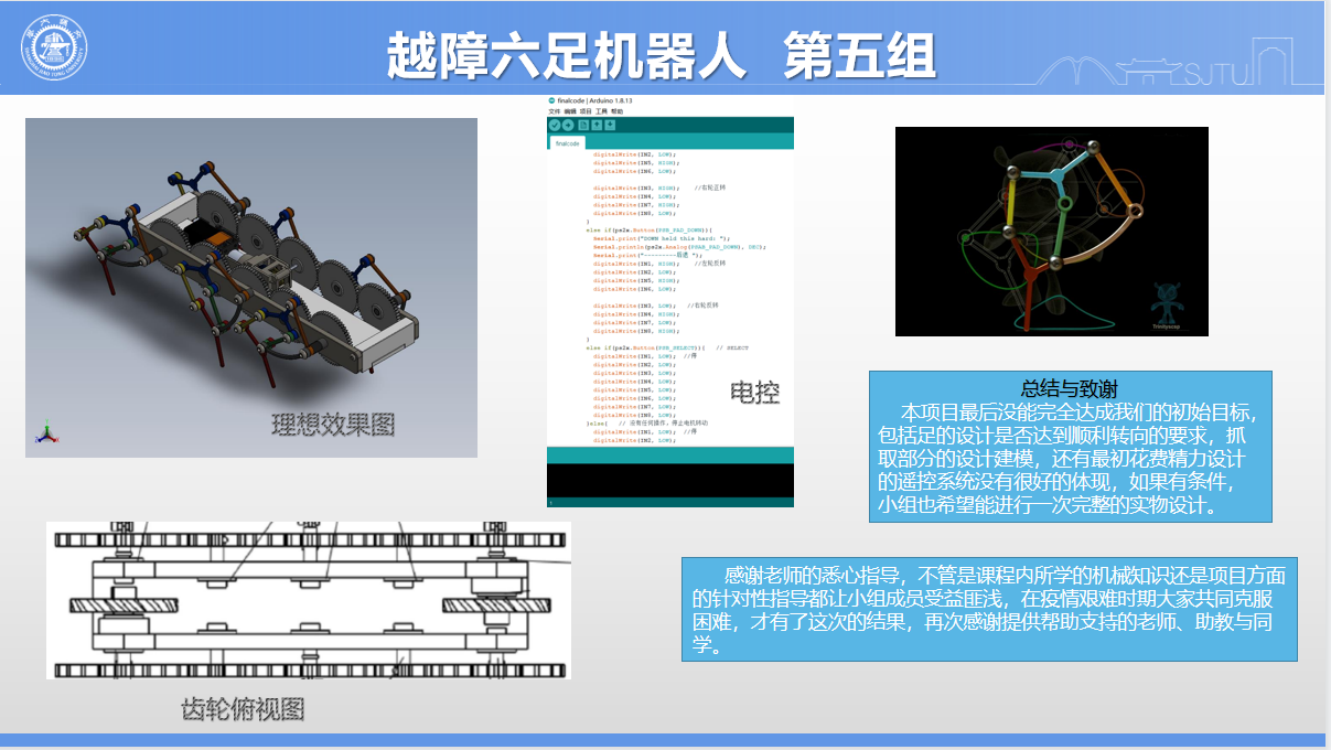
六足机器人相比于其他传统机器人,其有着更灵活多变的机械结构及步态,能较好的适应复杂环境,可以代替人类在一些复杂或有威胁的环境进行工作。本项目在机械结构方面模仿六足昆虫的身体构造进行了整体的结构设计,同时在步态规划方面模仿六足昆虫的三角步态进行运动,设计一种可远程操控,具备越障与运输功能的六足机器人。
本次设计主要目的在于制作一款能达到越障与搬运能力的可遥控的仿生六足机器人,在对昆虫结构有一定仿生的同时模仿昆虫的三角步态行进,同时能完成一定的复杂地形的跨越,并在此基础上稳定搬运小型物品,考虑到成本也尽可能的减小。六足机器人作为平台后续也可搭建更多传感器于机器人上,成为其“口耳鼻眼”,进一步提升机器人对环境的适应能力,同时也拓宽机器人的功能。
本次设计由于疫情虽无实物成品,但已作出设计图纸与虚拟机模拟。设计最终运用多种机械结构相互配合传动减少了舵机与电机的需求,使得机器人重量、成本都有所控制;同时材料的选取也符合机器人强度以及实际情况,制作相对简单;预计可以稳定地跨越带有一定坡度的地形以及一些颠簸地形;三角步态通过对结构的设计得以实现;遥控与机器人运动控制部分已用代码实现,可进行远距离稳定的操控;搬运部分能以搭载机械爪的形式运送质量较小的物品。
