

早在十五世纪,达芬奇就曾仿照鸟的结构设计了一款飞行器,近年来,机械鸟也频繁的出现在科幻电影和游戏中。受此启发,我们决定利用课程中所学的系统构成、常用机构的基本特性,机构的分析和设计方法等知识,设计并制造一款机械鸟,实现翅膀和尾巴的摆动、站立平衡等功能。通过调研分析,我们发现,关节活动是人们最关注的功能,即希望可以模仿现实中鸟类翅膀和尾部的运动,除此之外,站立平衡、机械鸟的移动和语音识别也是受关注的重点。
在经过讨论和权衡之后,小组将对于项目的目标规划分为三个层次,具体如下:
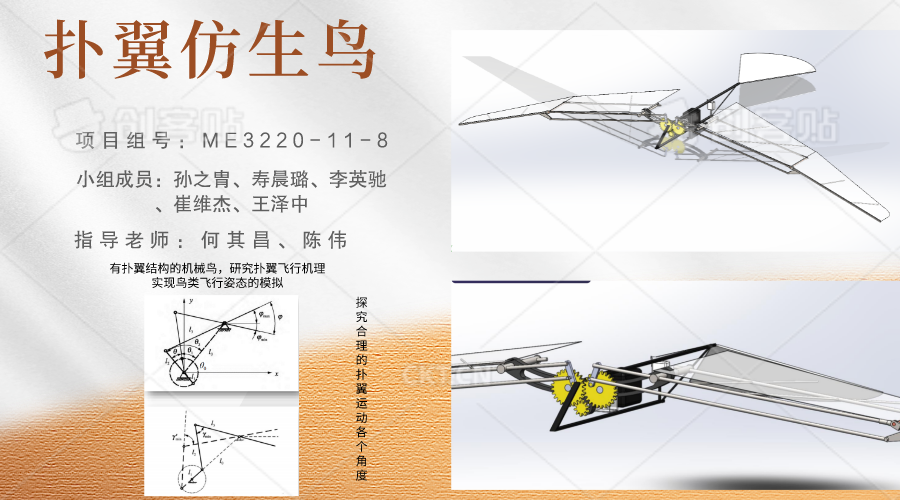
1.第一层次,实现最基础的飞行动作。在研究相关产品时发现,如今已有的扑翼飞行器大多为单片翅膀,而不是与鸟类类似的可弯曲的翅膀,所以初步希望实现基本飞行目标,用简单的结构制作样机,测试飞行性能,并进行优化调整。
2.第二层次,使用更贴近鸟类运动的结构。在样机试飞成功的基础上,将翅膀结构升级为两段式,更符合鸟类的翅膀结构,同时添加尾翼的摆动,使方向能够得到更好的控制。
3.第三层次,在已有机体上实现更多功能。在保证了仿生鸟的基础功能的实现之后,可以考虑搭载更多的功能模块,增强其应用价值,但是囿于时间的限制,可能在之后才有施展的空间,但是前期的机身减重设计,可以为将来添加模块打下基础。
项目的第一层次目标已经完成,第二层次目标在设计上结束。初步通过舵机为动力,碳纤维材料为主结构搭建了测试样机,测试了飞行性能,发现了机身平衡和机翼角度等可以改进的方面。在建模方面完成了第二部分的工作,改进了第一阶段存在的问题。
