

投掷机器人普遍用于羽毛球、网球等球类的发球,已成形的产品虽然可以实现投掷的功能,但装置复杂、体积较大,且无法实现小范围内的精确投掷。本项目基于课程项目挑战赛,希望设计出一款短时间内能够精确的将网球投掷在相应位置的机器人,准确高效的完成挑战赛任务。
我们希望投掷机器人可以容纳三个以上球体,通过机电一体化设计自动将网球依次送入发球装置,利用理论计算和动力学仿真调控发射装置的动力参数,网球可以按预设的轨迹准确地投掷在五个直径分别为50cm、40cm、30cm、20cm和10cm的圆形区域内,投掷中心距离依次为25cm、80cm、125cm、160cm和185cm。通过理论模拟和机电系统的设计,最大程度提高投掷的准确性和快速性。
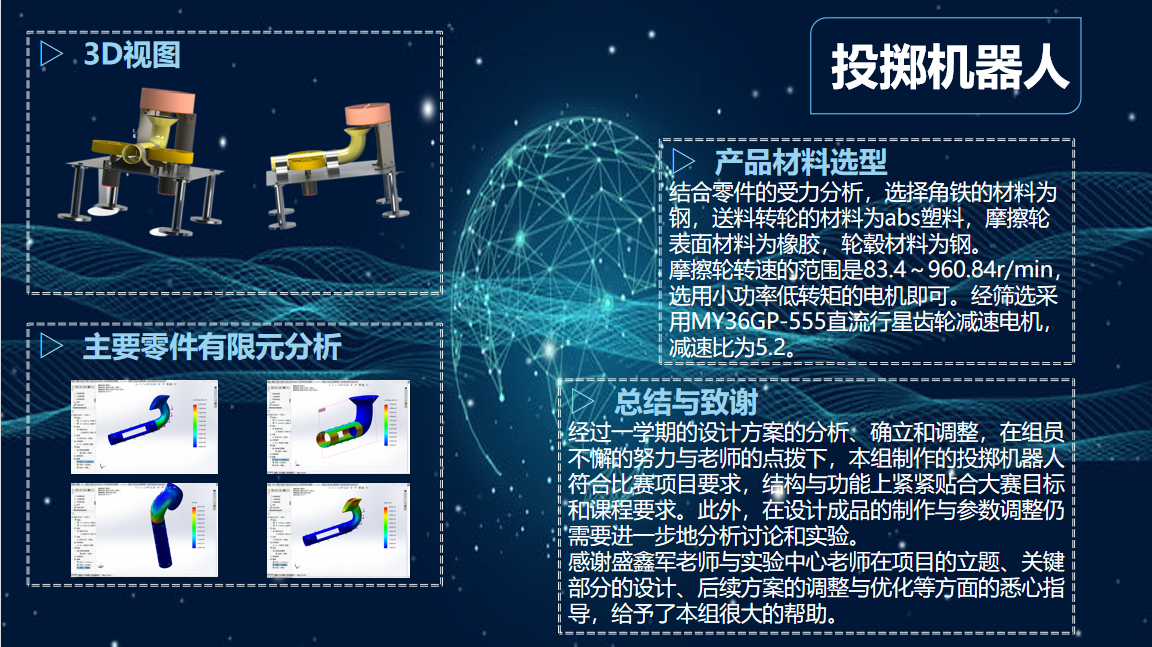
设计内置转动挡板的圆筒吸纳球体,挡板将圆筒划分为四个区域,其中一个区域连接传管道,挡板按一定速度旋转可将网球依次送入管道。弧形管道的安装精确控制网球的运动轨迹,管道末端两侧开孔,摩擦轮两侧安置为网球提供动力,管道的延伸确定网球的发射角度为水平唯一。通过动力学计算确定圆筒高度、管道轨迹和摩擦轮的加工材料,调控摩擦轮的转速,最终网球可以按预定轨道精确的投掷在相应位置区域。
