
楼梯是人造环境中的最常见的障碍,也是最难跨越的障碍之一,爬楼梯机器人的研究是解决当前全自主机器人在非结构环境下正常工作的重要环节之一。 爬楼梯机器人可应用于危险环境探查、侦察、救灾、导盲、助残、搬运、清扫、维修、安装等作业,其实际意义重大。当下有许多种类的爬楼梯机器的设计概念也陆续被提出,此项目采用步进式爬楼梯机器,目的在于应用到学校宿舍和教学楼帮助腿脚不便的学生安全的上楼。
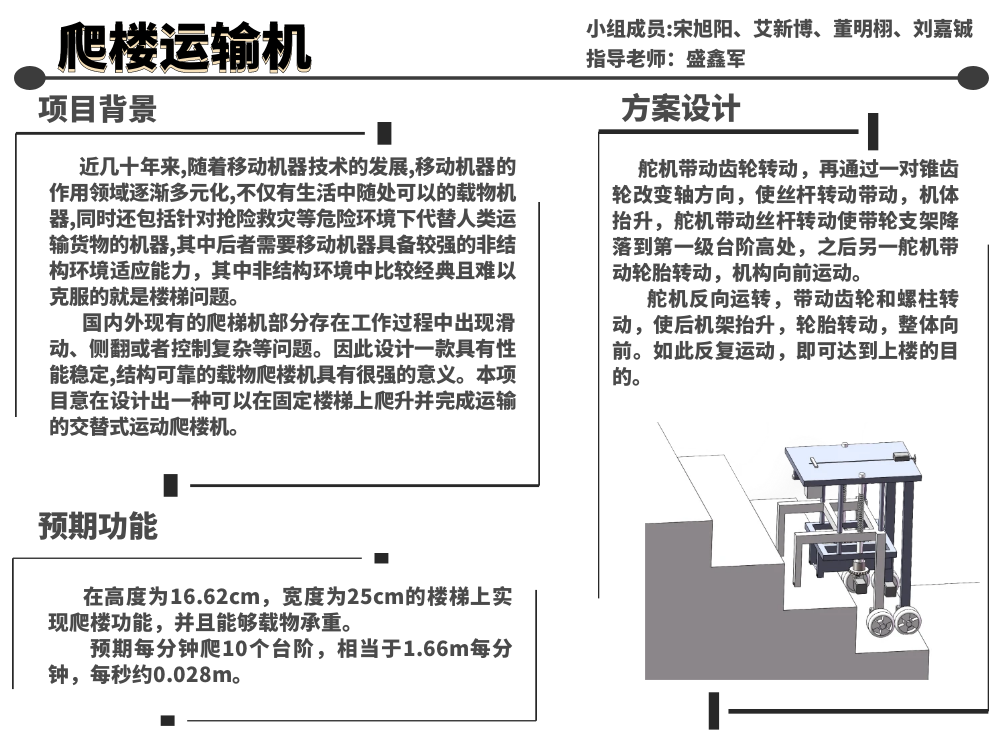
产品性能:承重比3-4,可爬最大坡度为30°,上下楼梯速度约为每分钟10个台阶,踏步高度为0.166米,踏步宽度(即台阶面的宽度)为0.25米。预期工作流程:舵机带动齿轮转动,再通过一对锥齿轮改变轴方向,使螺柱转动带动,机体抬升,舵机带动螺柱转动使带轮支架降落到第一级台阶高处,之后另一舵机带动轮胎转动,机构向前运动。舵机反向运转,带动齿轮和螺柱转动,使后机架抬升,轮胎转动,整体向前。如此反复运动,即可达到上楼的目的。
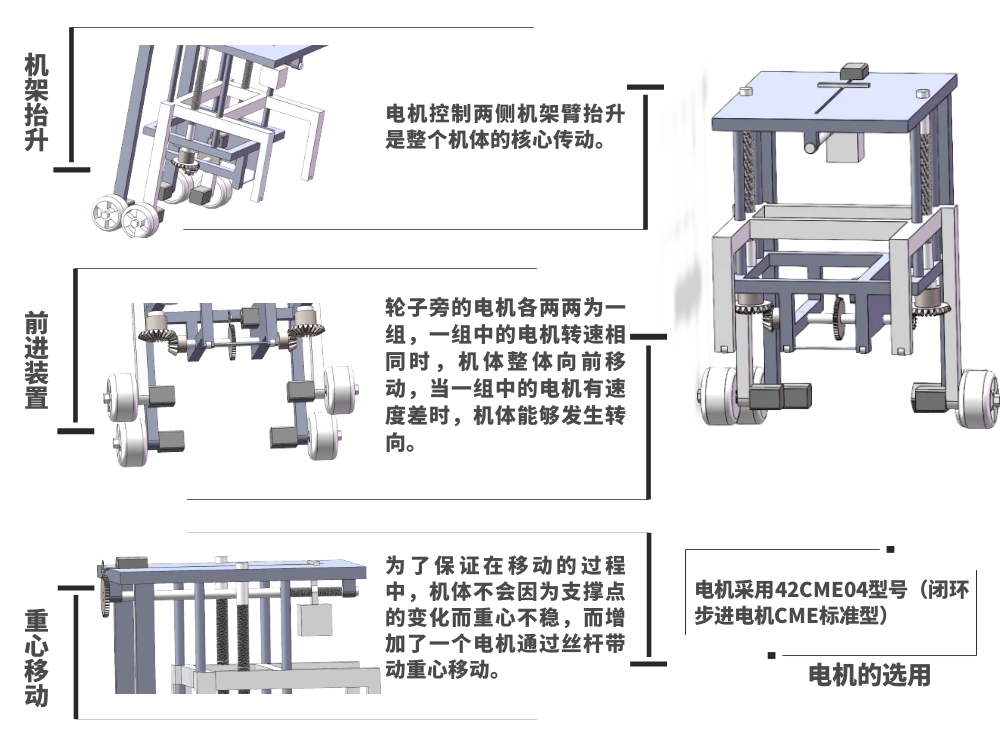
用完成了项目的整体框架的建模,用不同位置的舵机以及齿轮之间的配合完成了预期的机械运动,能够攀爬固定高度的楼梯,在每上一层楼梯之后可以通过两边的电机转速的不同可以达到转弯的效果,设计的中心移动装置可以保证在上升过程中整体机构的手力矩平衡从而不至于倾倒,通过solid works设计了运动算例,展示了各个机构运动时的传动原理以及整体爬楼梯的预期效果模拟。
