
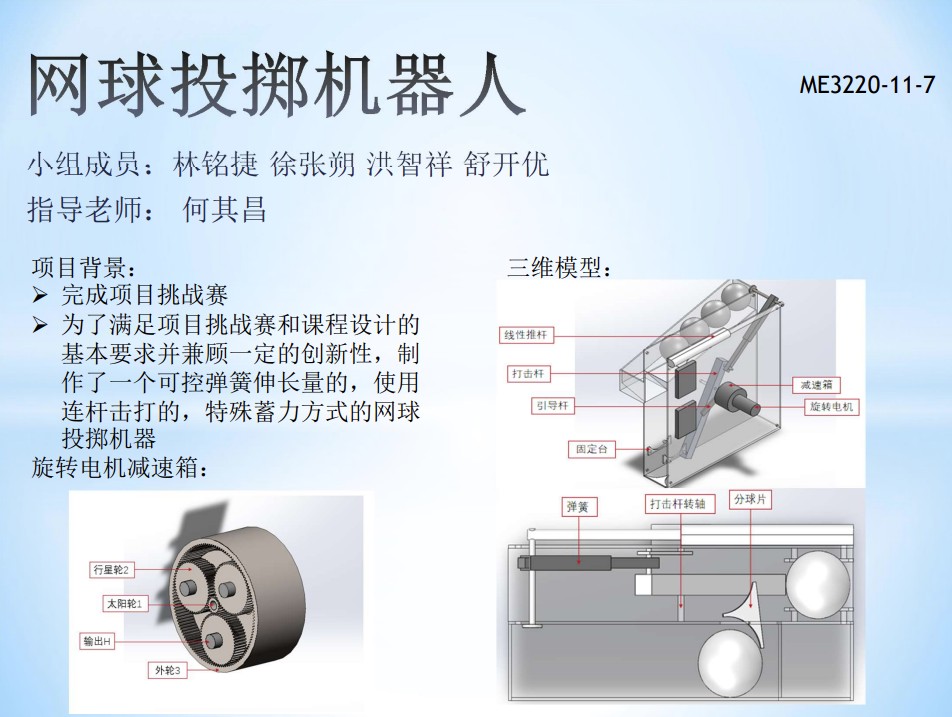
本项目项目名称为网球发球机器人,我们小组结合本课程所学的机械结构原理以及项目挑战赛的相关要求,制作了一个可控弹簧伸长量的,使用连杆击打的,特殊蓄力方式的网球投掷机器人。首先通过电机控制的推杆推动打击杆转动,此时连接在打击杆尾部的弹簧开始蓄力,待打击杆将弹簧拉至最大伸长量时,推杆不再限制打击杆,此后弹簧快速收缩,拉动打击杆实现对网球的击打。再一次击打结束后,在装置顶部的线性推杆会收缩,弹簧尾部连接在线性推杆上,可以实现弹簧初始位置的改变从而减小弹力,由此可以控制击球的距离。在打击杆向上旋转的过程中会拨动分球片实现下一个网球的安装。由此可以实现对网球的击打以及下一次击打的准备工作。
本装置是为了参加项目挑战赛,项目目标即实现项目挑战赛的要求:
1.限时五分钟将网球依次投入五个大小不同的目标区域;
2.机器人任何部位不可进入禁止区域;
3.尽量突出机械设计而非控制,但不可人工手动辅助运动;
4.装置初始需要填装至少三个网球,并在不手动干涉情况下完成三次投掷;后续可手动填装网5.球投入目标区域后再被反弹出目标区域视为完成,误投入错误区域的网球可手动清除.
同时尽可能的满足挑战赛的几项综合评价指标:总成本、装置机构及结构设计合理性、完整性和创新性;装置可靠性和预期使用寿命。
本小组将整个装置分为三个模块,分别为击打模块,控制弹簧伸长量模块,以及分球模块。我们将三个部分调试整合,实现了项目挑战赛的要求,通过控制初始电机转动实现打击杆的蓄力,在完成一次击打后,装置上方的线性电机会向前移动以减少弹簧的伸长量,移动的长度是我们通过实地实验的结果,由于疫情原因我们没能造出实物,但通过动画模拟,我们的装置能够稳定的准确的将网球投入指定的区域内,同时本装置还不同于一般的击打方式,满足了项目挑战赛创新性的要求。
