

投掷机器人除了在体育运动领域已经得到充分的运用之外,还在工业生产、紧急救援等多方面有着使用与发展的空间。本项目以投掷机器人挑战赛为契机,开发具有精准投掷功能的机器人。机器人具有储存网球、投掷网球、调节发射角度与速度等基本功能,以满足完成网球向指定位置发射的目的。此外,机器人将自动运行,实现定点投掷任务。
根据项目挑战赛的要求,投掷机器人需要在五分钟内将网球投掷进入五个大小不同的区域之中,且按完成时间排序。根据要求,机器人需要准确且快速地完成投掷流程。我们采用定点投掷的方式,省去机器人移动的时间,缩短完成完整投掷流程的时间。且拟通过提前计算、实验的方式,确定投掷到指定区域所需的投掷速度与角度,实现准确投掷的目的。且采用储球盘的方式存放需要被投掷的网球,通过单片机自动完成完整的装填-投掷流程。
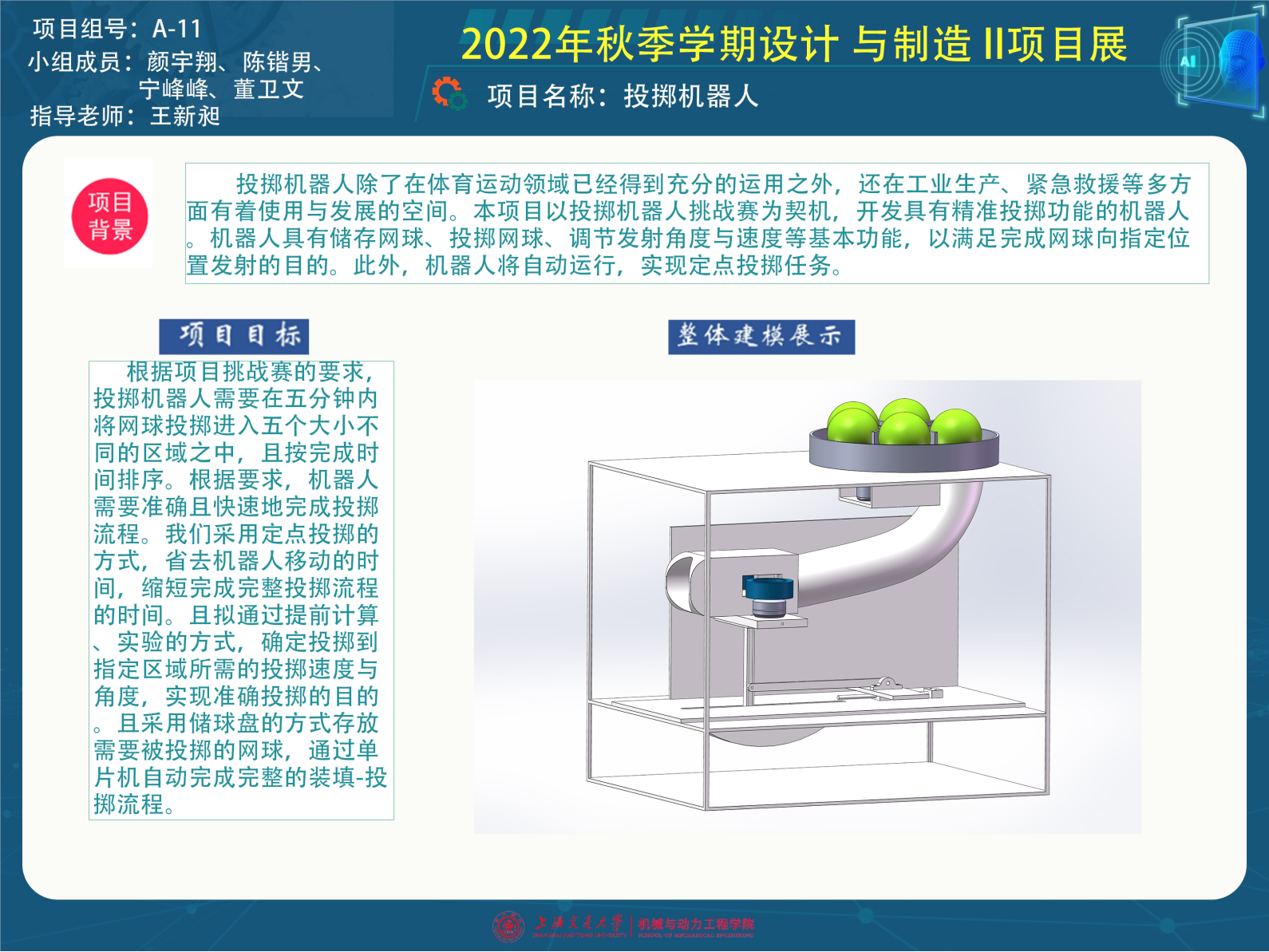
本项目的投掷机器人主要分为储球、调节、发射三个部分。储球部分通过轮盘存放待投掷的网球,可通过旋转轮盘使得即将投掷的网球落入发射部分。调节部分则负责调整发射口的角度位置。发射部分由摩擦轮和发射管道组成,采用摩擦轮挤压和摩擦的方式实现网球的发射。投掷机器人通过调节发射角度及摩擦轮旋转速度实现将网球发射至不同位置,三个部分依此运作实现完整的发射流程。本项目拟使用铝钢材和亚克力板搭建主体部分,通过3D打印的方式制造特殊零部件,再利用标准零件进行组装,完成投掷机器人的制作。
