
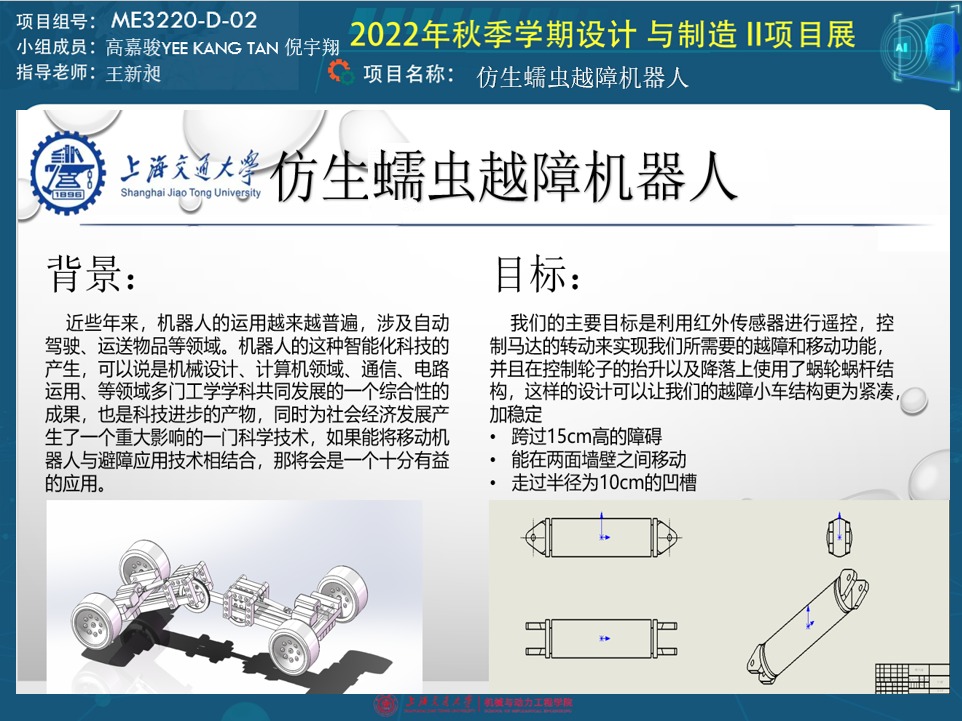
近些年来,机器人的运用越来越普遍,涉及自动驾驶、运送物品等领域。机器人的这种智能化科技的产生,可以说是机械设计、计算机领域、通信、电路运用、等领域多门工学学科共同发展的一个综合性的成果,也是科技进步的产物,同时为社会经济发展产生了一个重大影响的一门科学技术,如果能将移动机器人与越障应用技术相结合,那将会是一个十分有益的应用。于是,我们小组决定自行设计与开发一辆具有越障功能的小车,作为我们对自己兴趣和自动跟随技术这块领域的初步探索和实践。
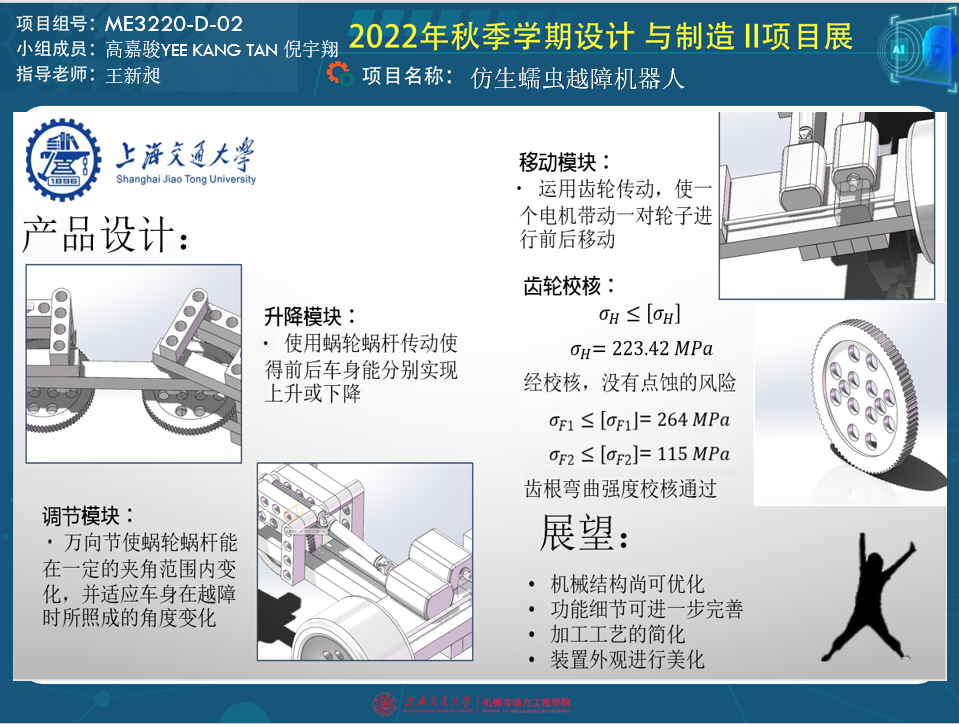
我们的主要目标是利用红外传感器进行遥控,控制马达的转动来实现我们所需要的越障和移动功能,并且在控制轮子的抬升以及降落上使用了蜗轮蜗杆结构,这样的设计可以让我们的越障小车结构更为紧凑,更易安装,与此同时,也通过蜗轮蜗杆的自锁特性保证小车在越障时候的稳定性。除此之外,我们在马达跟蜗轮蜗杆的连接处使用了万向节,实现转轴之间动力变角度传递,使小车工作更为可靠。
对于小车的越障实现,我们展开了多种方案设计,并最终确定了以蜗轮蜗杆控制为设计原型进行。我们完成了越障小车的设计与开发,并利用SolidWorks对其进行了3D建模。实现了基础的移动和避障功能,移动流畅且无卡顿,能越过15cm高的障碍、半径为10cm的凹槽、能够实现小车在两面墙壁之间向上移动。在设计中,我们妥善考虑了加工要求,并制造出了模型。我们设计了部分控制程序,并配合模型进行调试,测量误差,证明该设计方案的有效性。最后提出了改进意见和后续优化方向。
