
在防疫的大背景下,消毒杀菌显得格外重要。特别是在通风管道等处,很容易成为病毒潜藏的地方。而通风管道人工清理起来又很不方便,市面上又缺少有效的适应不同管径的清洁设备。
为了解决这个问题,我们决定设计一个可用于管道消毒杀菌的管道机器人。该机器人可以自行在不同管径的管道中行动,同时在管道中均匀的喷洒消毒液,来达到自动对管道消毒杀菌的效果。
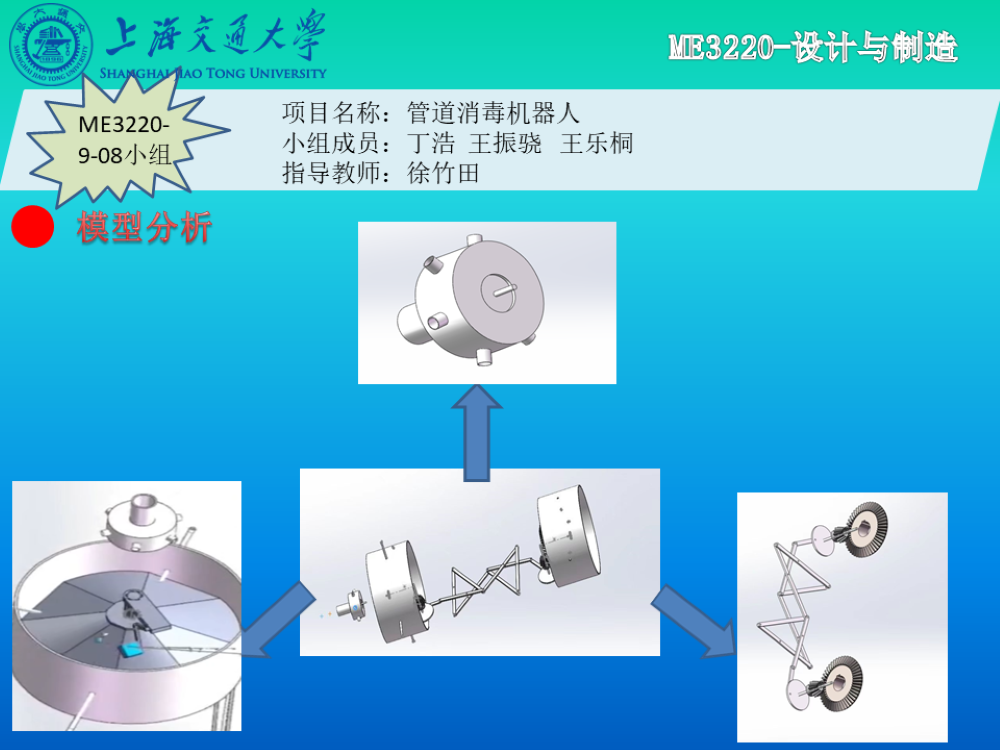
根据蠕虫爬行的姿势启发,设计了三节爬行机构与一节喷洒消毒液的机构,通过调整三节爬行机构的膨胀大小和膨胀顺序实现在不同大小的管子中正常爬行的功能。通过尾部的喷洒装置来进行均匀喷洒。
1:能适应30—50cm直径的管道并在管道倾斜15,30,45度下爬行
2:动作过程不得有人力辅助,机构自行运作
3:电机尽可能少
4:能够均匀喷洒消毒液
通过SOLIDWORKS顺利的建立了理论模型。并实现了运动学仿真。能够在使用两个电机的情况下实现装置的自行运动。能够适应不同大小的管径,理论上倾斜角可以达到90 度。可以从外界吸水进而均匀的喷洒消毒液。
