
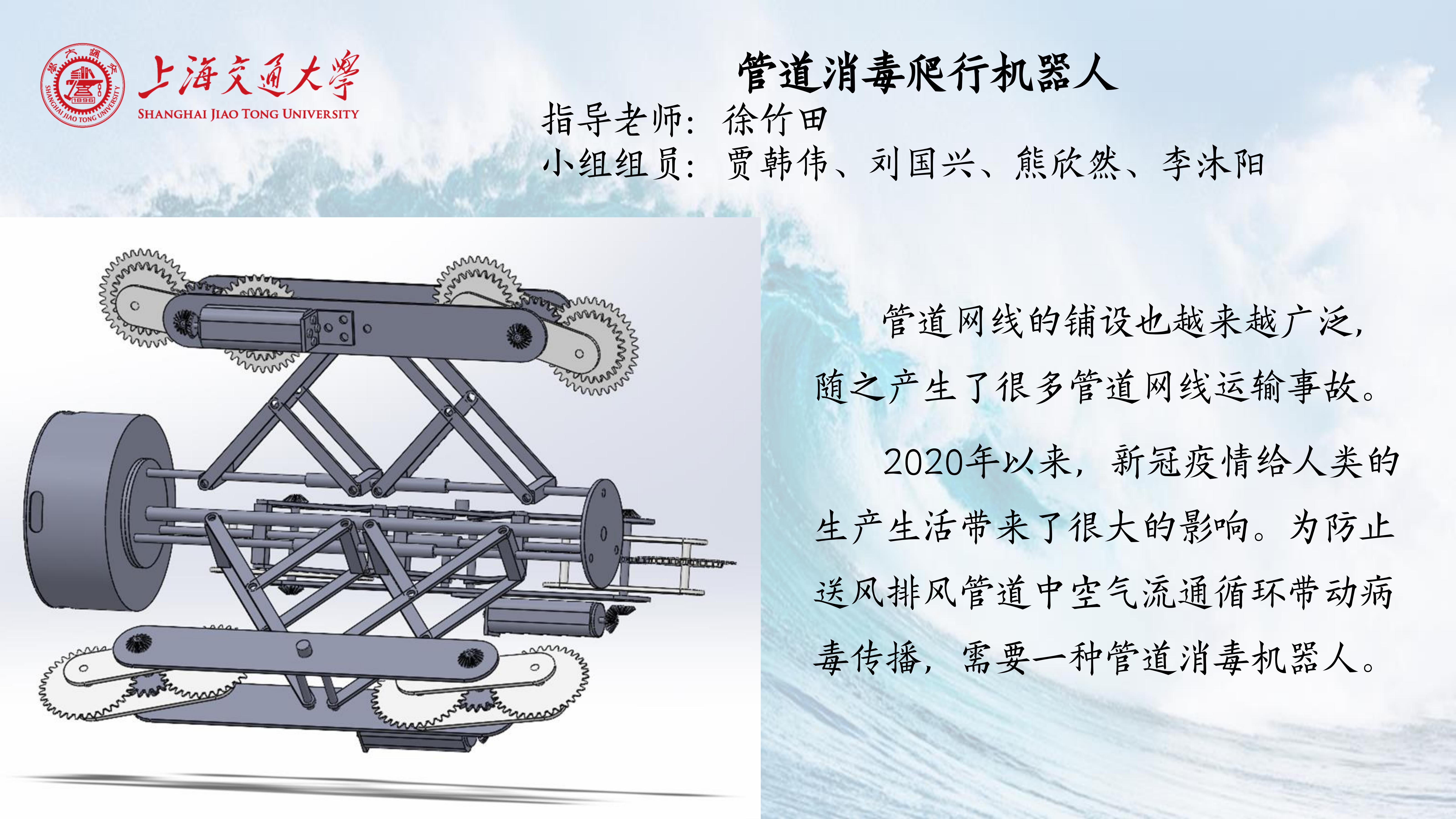
此外,管道运输是长距离、大运量运输方式,一旦发生破裂将造成巨大的经济损失以及对人的生命安全造成严重的伤害。由于石油管道需要穿山越岭、跨越河流,有些埋设在地下,有些架在高空,管线距离又十分长远,人力检测管道比较困难,管道机器人能够代替人类解决这个难题。管道机器人的行走方式多样,按照行走机构、运动特点分为: 履带式,支撑轮式、车式,蠕动式等。
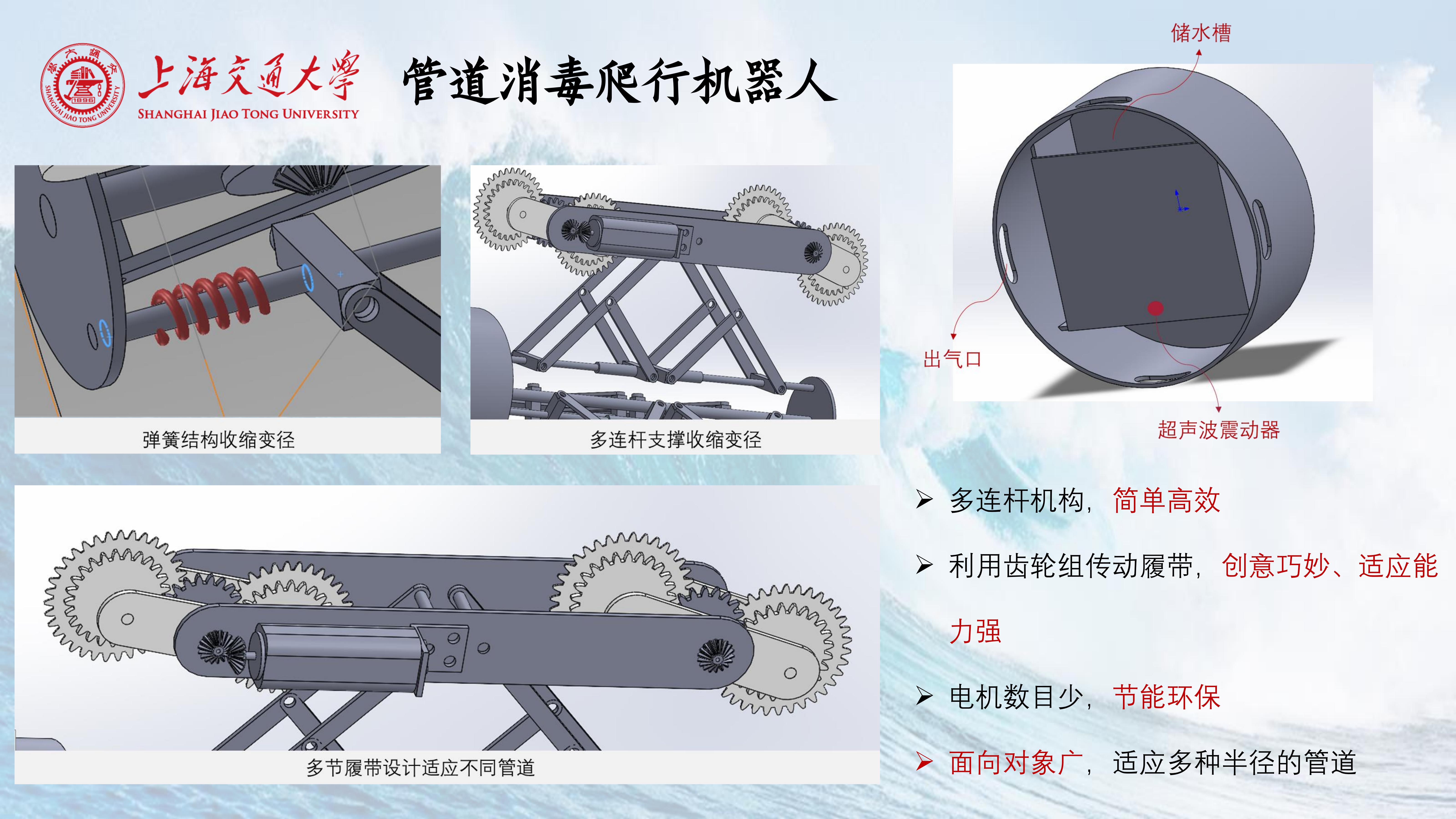
本产品设计的变径范围为30cm-50cm,要求可以从直径50cm的管道平稳均匀行驶进入直径为30cm的管道。
除了管道的直径会发生变化,实际生活中,管道也并不都是水平的,很多管道都与地面有一定倾斜角度,这就要求设计出的管道机器人能够在倾斜管道中前行。本产品将以倾斜角度为15°、30°、45°的管道进行计算校核,确保可以平稳通过且保证一定通行速度。
本管道消毒机器人的主要目的是进行管道内的消毒,因此消毒装置必不可少。因为管道的直径和倾斜角度都在变化,管道机器人在行驶过程中既要保证不能溢出消毒液又要保证将消毒液均匀地喷洒到管壁上。
现在已完成前期的结构设计、方案选择;所有零件的建模、组装和优化改进;针对履带的摩擦系数和运动形式,计算校核弹簧的弹性系数和初始长度。
