
本项目产品为投掷机器人。自动机器人广泛应用于现代工业中,为了满足高效和便捷的需求,需要机器人能够更高效地工作。现有的机械设备功能单一,不能进行进一步提高工作效率。现在快递站等需要大量货物运输的场景中有较大需求。
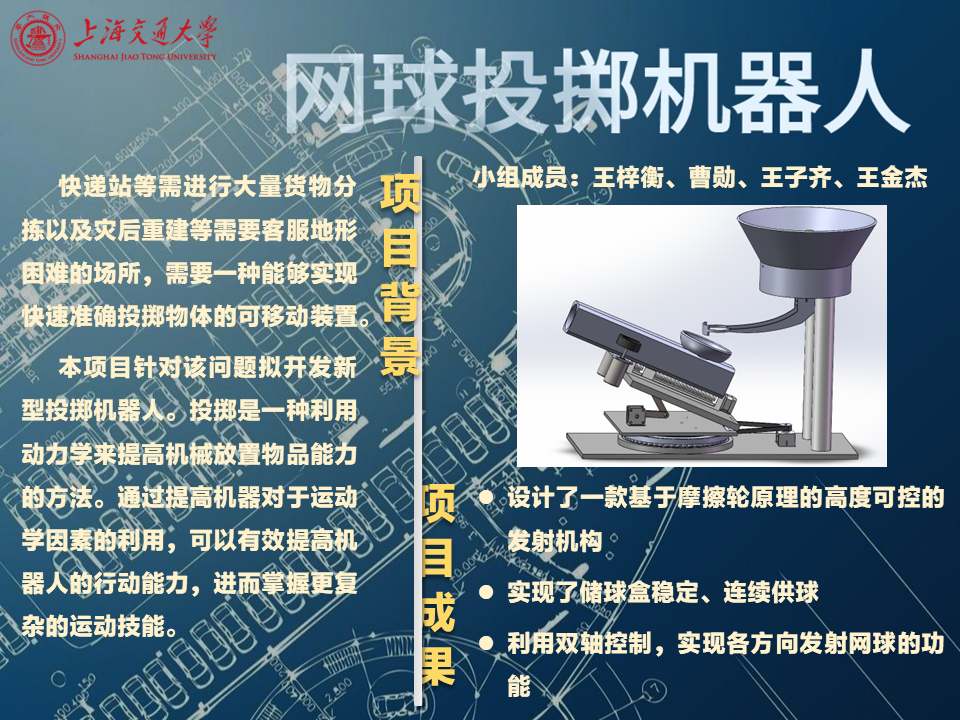
本项目针对该问题拟开发新型投掷机器人。投掷是一种利用动力学来提高机械放置物品能力的方法。通过提高机器对于运动学因素的利用,可以有效提高机器人的行动能力,进而掌握更复杂的运动技能。
投掷机器人总共分为四个部位,分别为发射部分、存储部分、方向控制部分、底座移动部分。其中发射模块需实现小球的高速发射,且发射初速度和角度稳定;存储部分需要实现同时容纳多个小球,并且能够在小球发射后自动将小球输送到发射部位,同时不能有卡顿现象;方向控制部分需要实现水平和竖直两个方向的转动,并且能够稳定在所需的发射角度上。
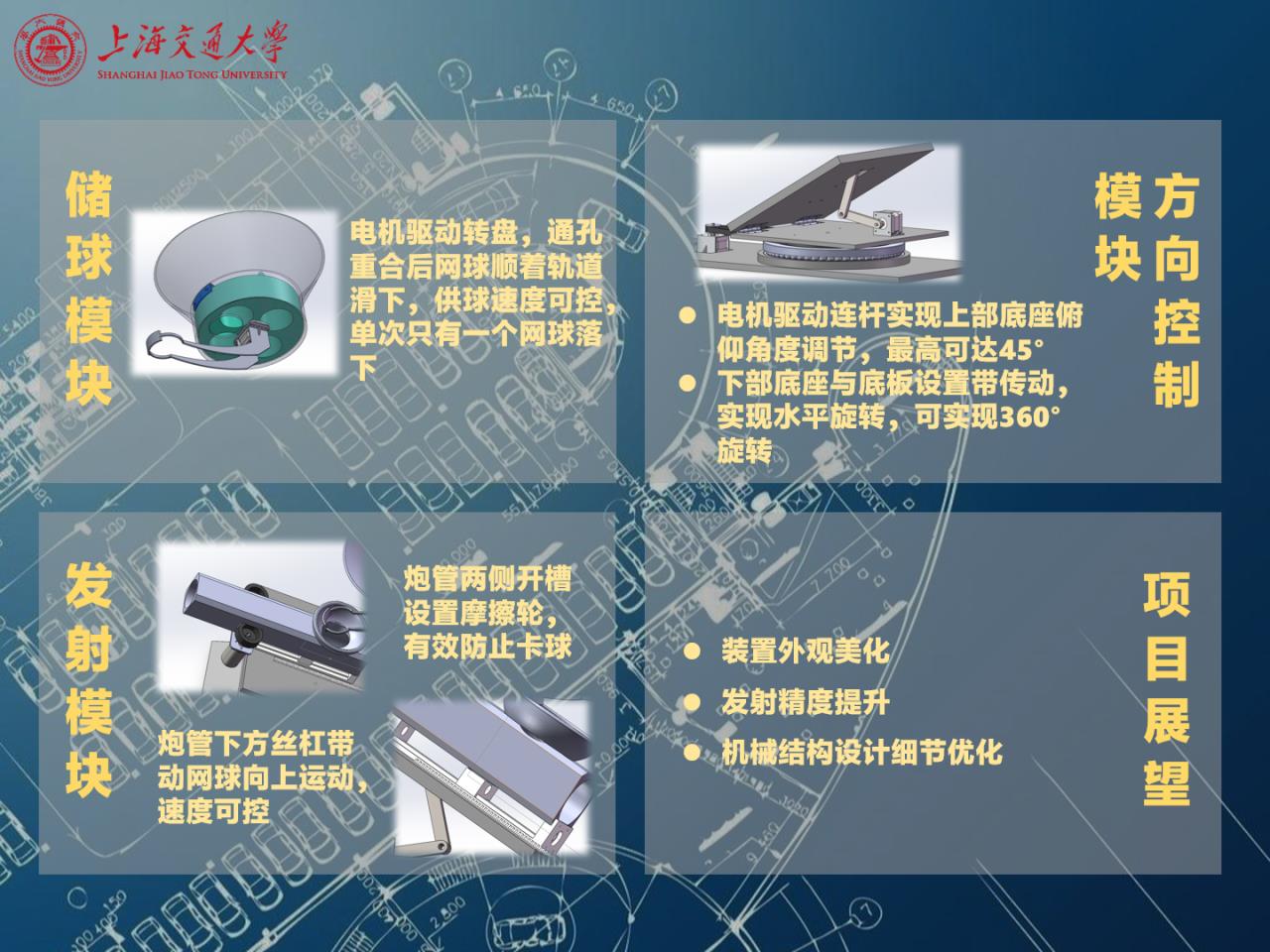
1. 投掷机器人的发射部分,根据市面上已有的网球发射器特点,我们淘汰了机械推动,机械手投掷,投石车型抛射等发射方法,最后采用可控程度最高的摩擦轮加速的方法,通过摩擦轮高速旋转带动球体发射,并有希望实现球体的旋转控制
2. 投掷机器人的存储部分,我们参考了多种供球方案,最终设计出网球通过储球盒底部旋转通孔实现运球的方案
3. 投掷机器人的方向控制部分,我们参考机器人控制中双轴控制的思路,以电机为动力源,利用yaw轴负责水平方向的整体云台旋转,pitch轴负责竖直方向的角度调整,实现各方向发射网球的功能
4. 投掷机器人的底座移动部分,我们考虑在两种方案间选择:如果最终实现的机器人体积重量大,难以移动,我们选择双轮底座+拉杆的移动方案;反之可以选择以方向云台为固定底座的方案
