

小组的项目为项目挑战赛的投掷机器人。设计的装置主要有四个功能:1、剪叉机构调整装置高度,以便调节发射的距离;2、连杆机构将小球推至预发射轨道,并控制小球进入发射轨道,实现小球自主填装功能;4、连杆机构压缩弹簧,将弹簧能量转化为小球动能,将小球发射出去;5、小车带动装置移动,调整发射位置。通过这些功能的组合运用,实现装置对小球的自主投掷。
我们希望设计出能够实现自主装填,自主发射的投掷机器人。在装置中,通过舵机驱动,带动连杆机构,齿轮等机械结构进行运动及传动,实现设计的基本目标。同时,通过运动副选型,材料选择最大限度地降低总成本,提升装置机构及结构的稳定性,提高装置可靠性和预期使用寿命。
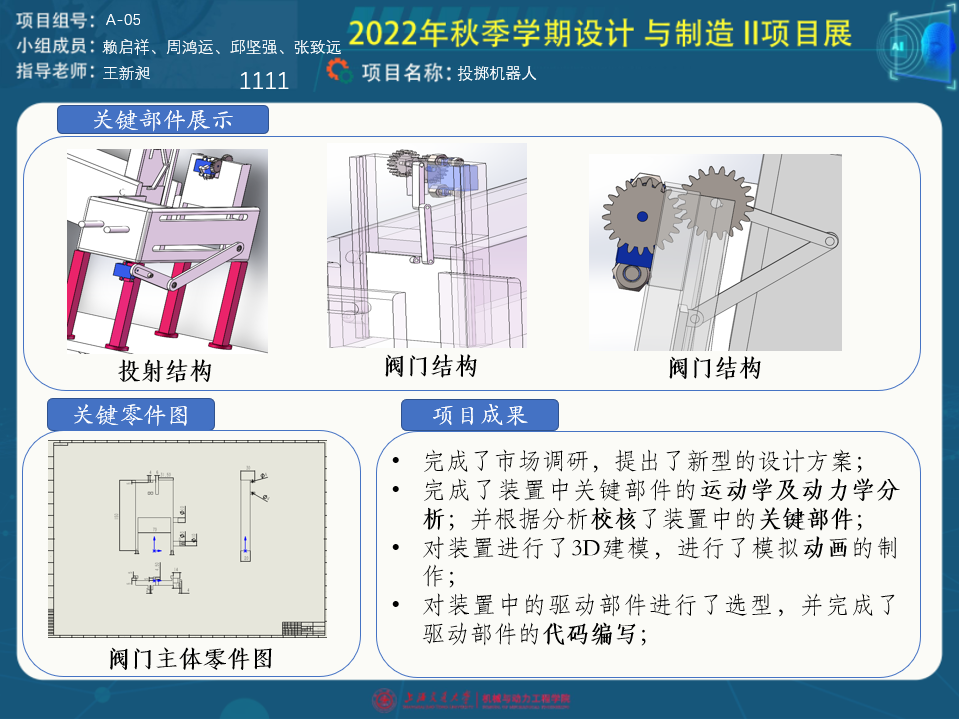
1、完成了投掷机器人的市场调研,提出了新型的设计方案;
2、完成了装置中各个机械结构的参数计算及设计;
3、完成了装置中关键部件的运动学及动力学分析;并根据分析校核了装置中的关键部件;
4、对装置进行了3D建模,进行了模拟动画的制作;
5、对装置中的驱动部件进行了选型,并完成了驱动部件的代码编写。
