
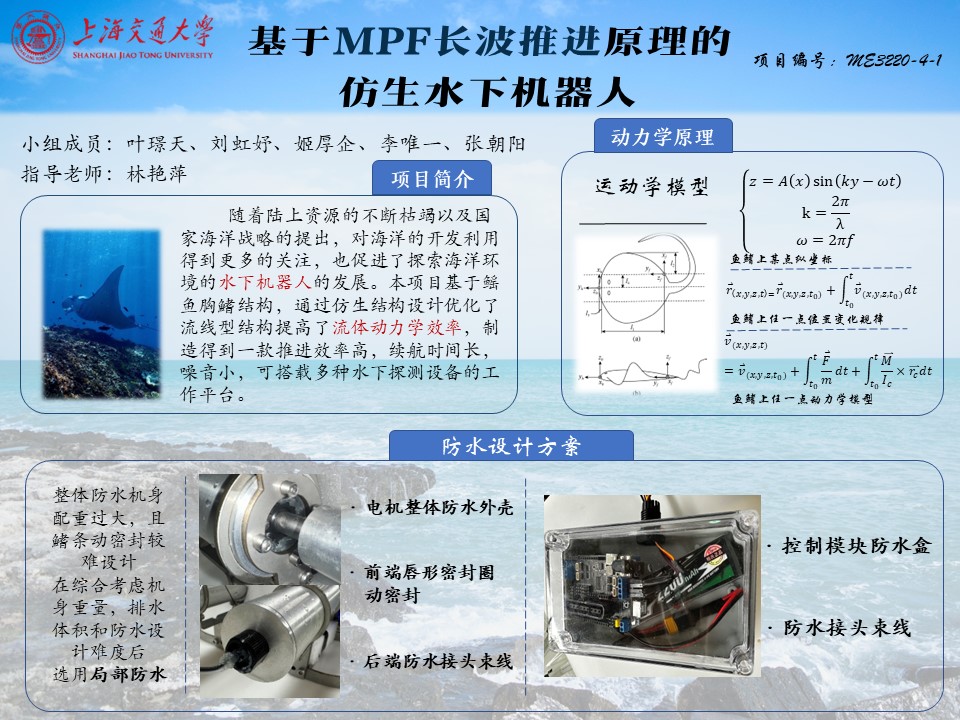

本项目是基于MPF长波推进原理进行设计的仿生水下机器人,我们通过模仿魔鬼鱼游动时的鳍面波动传递来进行机器人的结构设计,通过设计得到同轴齿轮系-曲柄摇杆传动机构、万向节-连杆滑槽俯仰机构,同时通过建模、分析、计算得到了3维建模,同时完成了样机的加工与装配,我们通过实验与测试完成了仿生机器人的前进、后退、差速转弯、俯仰等动作的机械运转过程,较好的完成了项目的目标。
1. 机器人能够实现水下的正常运动(良好防水性能)
2. 机器人水中悬停与转弯动作的机械结构设计
3. 机器人水中姿态改变(俯仰等)动作的机械结构设计
4. 机器人满足在水中低噪声、高效率前进
5. 机器人可搭载一定传感器结构进行水质检测、水下探测、水下巡航跟踪等研究内容
在本次课程项目设计的过程中,我们小组完成了文献调研、概念设计、建模迭代、加工装配、样机设计等工作,虽然本学期受到疫情的影响较大,但在小组组员的协作下,我们最终完成了样机的加工、装配、调试等工作,较好的完成了设计目标,获得了以下成果:
1.机械设计:基于MPF原理的多鳍传动机构设计、俯仰传动机构设计、支撑骨架设计、机器人整体三维建模。
2. 防水设计:电机的局部防水、舵机的局部防水、电控模块的防水设计。
3. 实物测试:较好的完成了机器人前进、后退、差速转弯、俯仰等姿态动作调整,并验证了水下测试时防水方案的可靠性。
