

本项目开展背景是投掷机器人项目展挑战赛,需要将网球投入不同大小的五个目标圆内。同时,网球投掷的机器人在市场上也有着广阔的应用前景,能够完成特定目标和角度的投掷机参与辅助教学可以更好的提高学生的网球技术动作,更有助于提高学生学习网球的兴趣性、积极性和主动性,更有助于教师个别指导。本项目设计了一种自动识别目标的网球投掷机器人,能够完成各种目标的投掷任务。
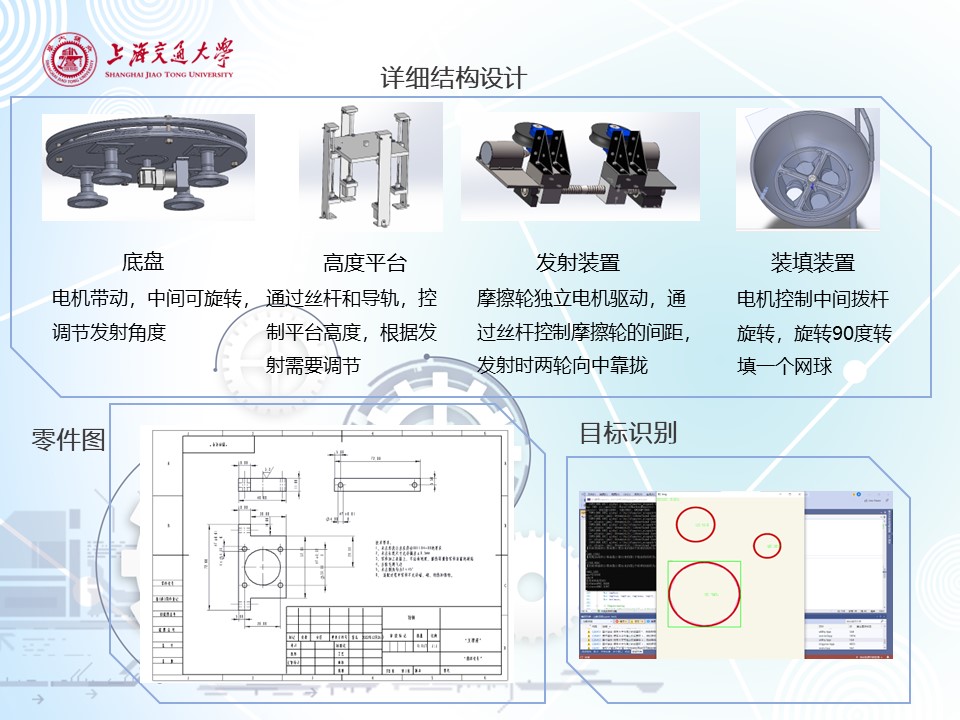
我们设计的网球投掷机器人可将网球依次投入大小不同的目标区域,同时可在一定时间内完成投掷,且投掷范围有一定的精度,总体需要完成四个动作,捕获,调整,装填和发射。通过摄像头捕获目标信息,采集投掷目标位置,利用机械机构控制调整发射角度和高度,通过旋转漏斗的结构完成装填,最后,通过摩擦轮发射网球到指定目标位置。
通过前期调研,设计任务布置,设计和调整工作,我们小组完成了方案选择和项目模型的solidworks建模,控制方案的编写。对于部分零件,通过设计计算验证强度和性能是否满足要求,对于底盘等位置完成应力分析,制作了功能的仿真动画和零件的工程图。本项目让我们的创意和想法得以实现,也是对课堂学习的理论知识的实际运用。在向我们提出考验的同时也极大地提升了我们的能力,还加深了同组同学的友谊。
