
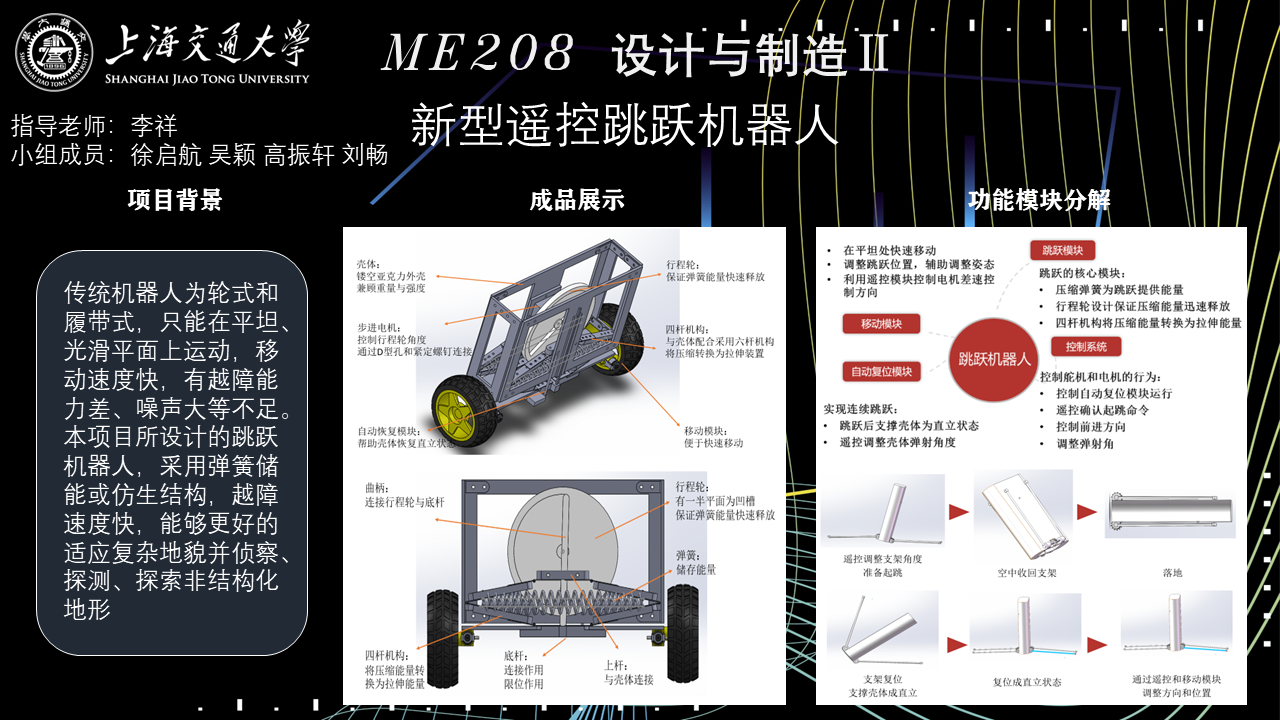
本款跳跃机器人是在传统轮式运动机器人的基础上,增加连续跳跃功能,以实现复杂地形运动的新型机器人。整体以电池供能,驱动电机拉动机械弹簧储能后释放,可利用地面反作用力实现至少50cm跳跃高度,在落地后,可通过遥控模块快速复位并调整位置和起跳角度,以适应不同的跳跃要求。
至少需要实现的四个功能模块:
一、移动模块。能在平坦地面移动和调整跳跃位置及姿态。
二、跳跃模块。需要保证至少50cm跳跃高度。
三、自动复位模块。能使机器人落地后快速完成二次跳跃准备并调整起跳角度
四、控制模块。跳跃、复位、移动等指令可通过遥控传递。
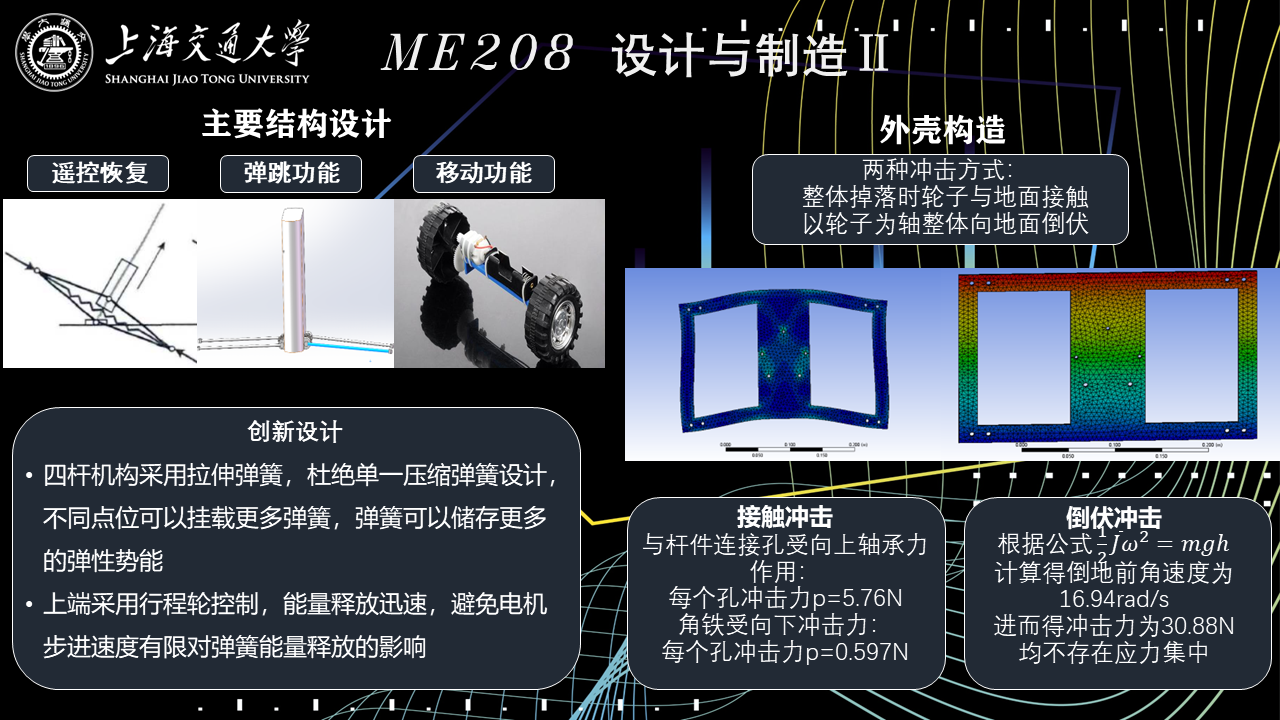
我们完成了满足项目目标四个功能的跳跃机器人模型构建,并采用了如下几项创新设计:
一、在弹跳功能模块采用了拉伸弹簧而不是压缩弹簧的设计,以获得更多的储能。
二、在储能释放中采用了“行程轮”控制,使得能量释放更为迅速,减少损耗。
三、在外壳构建中使用镂空设计减少重量。
