

移动机器人运动的灵活性越来越受重视,面对恶劣环境、复杂地形和危险区域,传统步行或爬行机器人以及轮式和履带式机器人的障碍穿越能力有限,在面对高于自身高度的障碍物如楼梯、碎石、沟渠等非平面环境时甚至难以移动。而弹跳机器人相对于轮式、履带式、足式机器人有更强的越障能力,可以轻易地翻越数倍于自身的障碍,其爆发性也让机器人更容易躲避危险,在复杂未知的环境移动、自保能力更好。本项目参与弹跳机器人挑战赛,正是在这个背景之下进行。
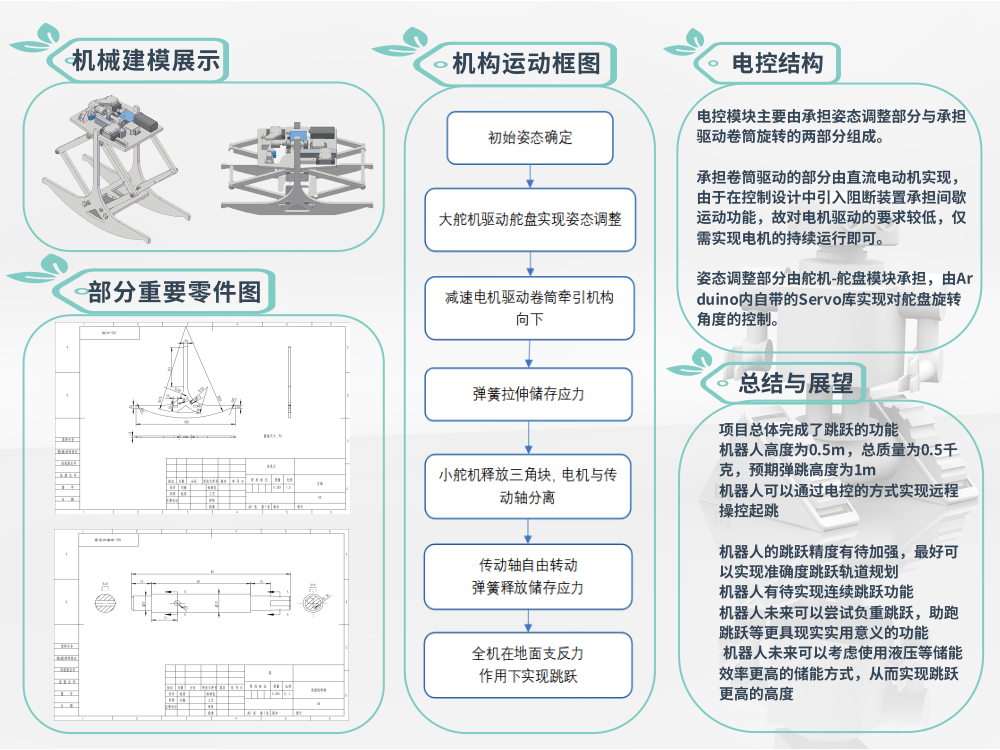
根据挑战赛目标要求,最终设计成品应具备可重复性,即多次跳跃能力,此外设计还需具有新颖性,要用于挑战具有创新性的结构设计,根据这些技术要求,经过多次构思迭代,我们最终确定了如下技术路线:跳跃机器人分为上下两部分,中间通过连杆连接,连杆间安装有弹簧作为储能原件,跳跃机器人上部安装电机与卷带卷带另一端与下部相连,通过驱动电机来实现卷带的卷动,从而实现弹簧的拉伸储能,之后在合适的位置释放卷带,即可实现弹性势能向机器人动能的转变,从而实现跳跃。根据参数估计,我们初步设定技术目标如下:1、机器人最大高度为0.5m;2、总质量为0.5千克;3、预期弹跳高度为1m。
最终设计成果包括电机选型、传动方案、结构设计、应力分析、控制方案等五个部分。电机选型确定为直流电机130小电机;传动方案通过齿轮方案、凸轮方案、带传动方案的对比,最终确定为啮合传动,即通过电机与卷筒轴的啮合实现传动;结构设计方面,在连杆机构、平衡足、楔形滑块弹出机构和配重滑块曲柄滑块机构等方面作出相关设计;应力分析方面对杆件做了相关强度分析,结果良好;电控部分通过对直流电机和大、小舵机的控制,实现整个机器人的跳跃。总体来说,根据动力学仿真结果,设计项目能够达到需求。
