
投掷机器人的商业发展已然较为成熟,但是在使用时常作为发球装置(篮球、网球、乒乓球等),主要是以较高的速率、确定的方位大量连发。而我们将设计一款重点在于能够做到在限定范围内有高准确度、能对不同距离做出调整,且有较高的投掷物/装置重量比的网球投掷机器人。本次挑战课题将装置的投掷准确度、总质量与总成本作为重要指标,我们的设计也对应于以上指标。同时我们将兼顾装置机构与结构设计的合理性、完整性与创新性,以达成挑战课题的综合评价指标。
该投掷机器人的设计基于项目挑战赛,故以比赛要求为主要目标。我们希望可以开发一款兼具功能性(即能够储存球、自动填装发射,同时具有足够的投掷距离范围与准确度)、稳定性(在投掷时装置不倾斜、不滑移)与可靠性(在重复的多次投掷之间位置误差小)的投掷机器人。此外,我们希望采用机电一体化的设计,同时实现机械与电气两种控制方式。并且希望通过合理设计的零部件,兼顾功能的同时控制生产工艺的低成本,做到精巧节约。
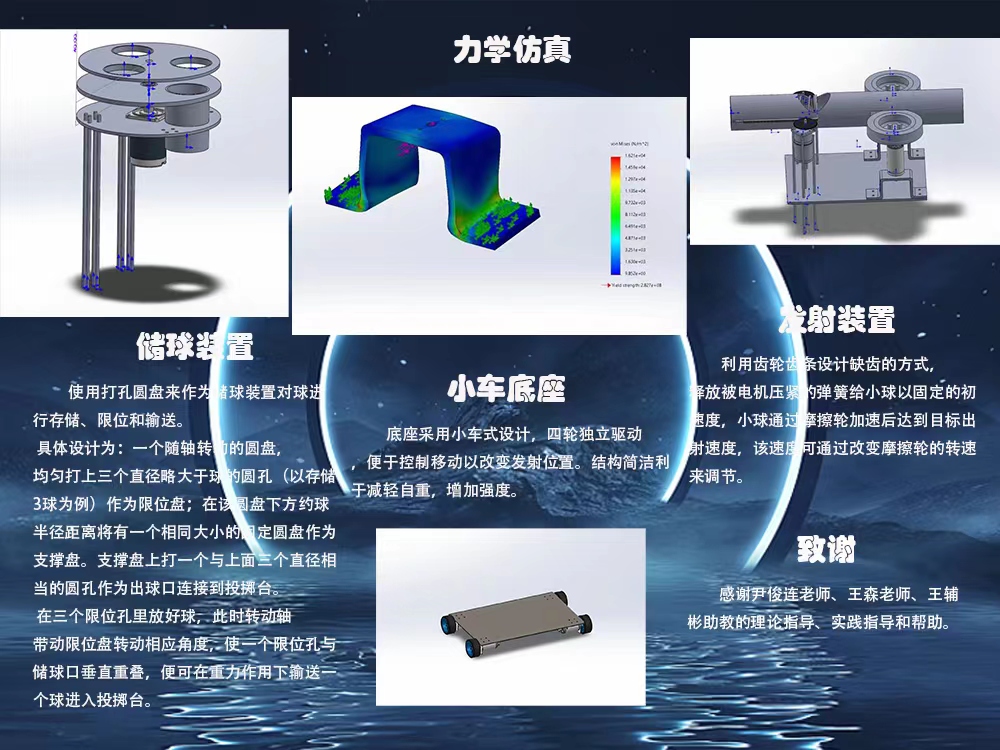
我们对投掷机器人底座的设计采用了底座采用小车式设计,四轮独立驱动,便于控制移动以改变发射位置。结构简洁利于减轻自重,增加强度。还设计了带有打孔圆盘的储球装置,通过导管与发射装置连接,使其能做到对小球的储存、限位与输运。在发射装置的设计中,我们使用轨道底部弹簧为小球提供初速度,使其通过摩擦轮加速(最终速度的控制由摩擦轮转速决定),从而实现小球有确定的发射水平距离。此外由于线上参展,电气化设计和成本控制方面无法展示成果。
