
仿生青蛙就是一种能在多样环境中作业的机器人。青蛙是两栖动物,具有优异的跳跃、游泳能力。跳跃使仿生青蛙具有良好的越障能力,而游泳能使仿生青蛙在水中灵活地活动,即仿生青蛙在多种环境中都具有良好的运动能力。因而在上述探索、救援等工作中都能起到良好的效果。本项目意在开发一种基于凸轮弹簧机构的仿生青蛙,能在较低成本下达到跳跃的基本功能。
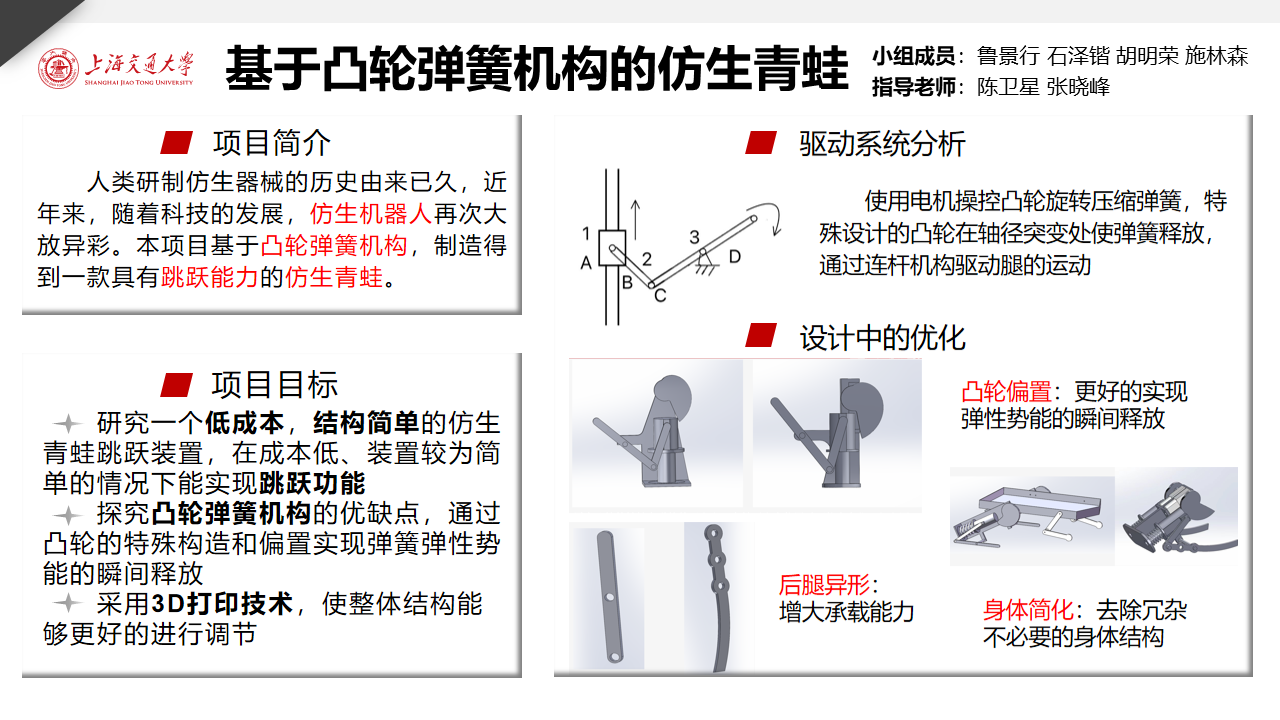
研究一个低成本、结构简单的仿生青蛙跳跃装置,能通过简单的机械结构基本实现跳跃功能。
探究凸轮弹簧机构的优缺点,通过凸轮的特殊构造和偏置实现弹簧弹性势能的瞬间释放。
采用3D打印技术,使成品整体结构具有可调节功能。
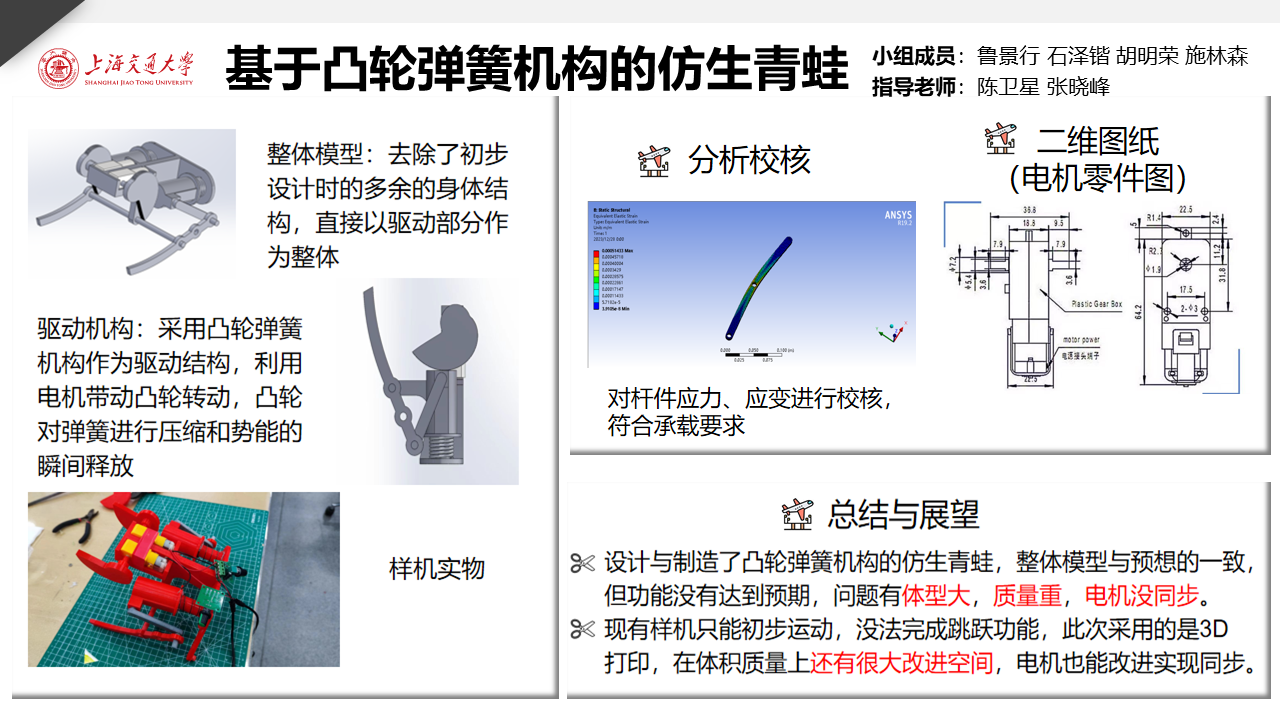
基于设计与制造课程中关于凸轮机构的教学部分,实践了从动件运动设计,凸轮机构选型设计、凸轮机构参数设计、凸轮廓线求解、性能分析校核一系列步骤,完成了对于凸轮结构的设计与制造。
基于设计与制造课程中关于连杆机构的教学部分,通过对机构的运动与受力分析,进行了连杆机构尺度设计,达成了整体所需能量的传导,并运用ANSYS进行了力学仿真,对杆件的设计进行了改进。
制作出了样机,经实际测试,强度符合预期,样机整体强度、稳定性较好。
