

随着科技的不断发展,人类对于仿生机器人的研究也越来越深入。仿生机器人可谓是人类科技最为前沿的领域之一,通过对生物机理的研究,让机器人具有像真正生物一样的行为能力和外形特征。在这个领域中,机械仿生蜘蛛机器人是一种具有很大潜力的设计。我国在仿生蜘蛛领域的大多数研究成果体积较大,适用场景有限,本产品希望设计出能应用于日常生活并帮助完成一些简单任务的仿生蜘蛛机器人。
1.仿生蜘蛛能够通过模仿蜘蛛的外形、结构和行为而高效地完成搜查搜救、建筑维修、农业科学研究等任务。
2.通过科学的仿生与机械设计,仿生蜘蛛可以具有强大的负载携带能力,从而为执行任务提供更多的功能和应用。
3.仿生蜘蛛具有多个构件、转动副与移动副,具有高自由度能够模拟蜘蛛的各种动作和姿势。通过控制可以在各种环境中灵活地爬行、攀爬和悬挂。
在本次课程项目设计的过程中,我们小组完成了文献调研、概念设计、建立模型、加工装配、功能测试等工作,在小组组员的协作下,我们最终完成了作品的加工、装配、调试等工作,较好的完成了设计目标,获得了以下成果:
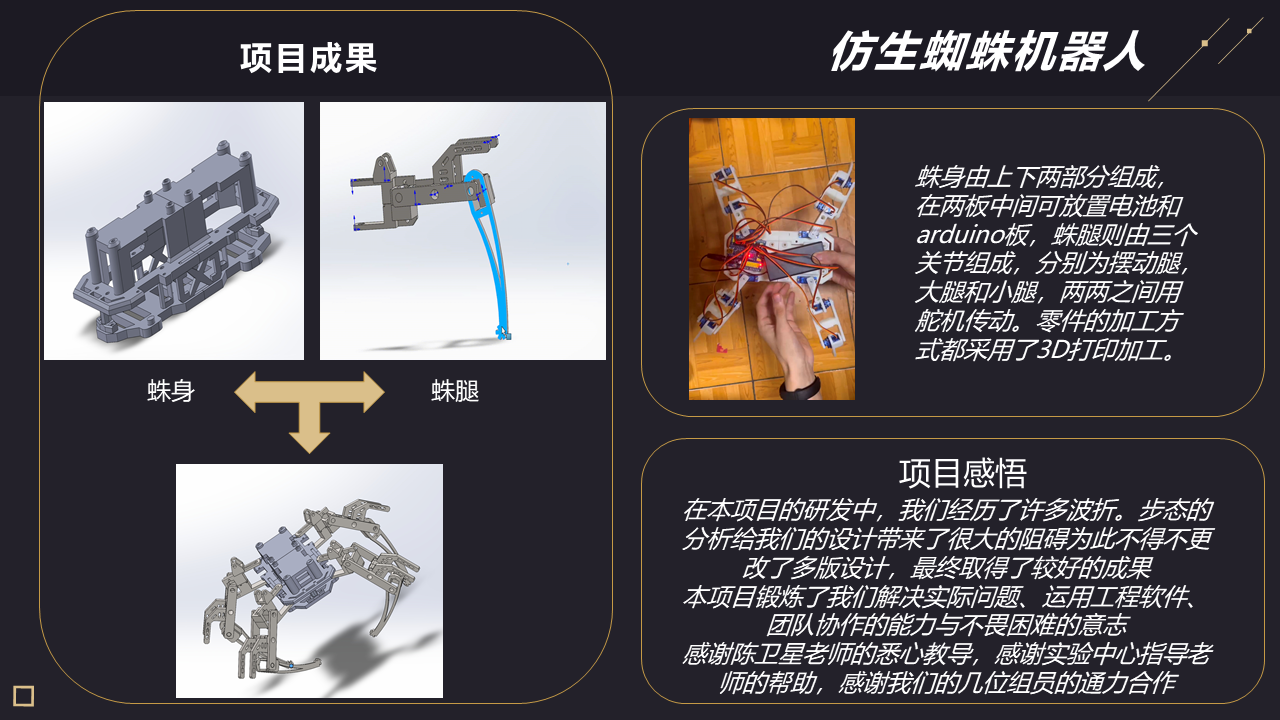
1.机械设计:我们使用solidworks成功建立了蛛身和蛛腿的模型,蛛身由上下两部分组成,在两板中间可放置电池和arduino板,蛛腿则由三个关节组成,分别为摆动腿,大腿和小腿,两两之间用舵机传动。
2.步态分析:我们成功使用了课程所学知识对蜘蛛的运动进行了步态分析,较好地模拟了蜘蛛的行进方式。
3.实物测试:蜘蛛的体积重量均较轻,符合设计要求,且具有一定的载荷能力。
