

跳跃式机器人运动灵活性高、越障能力强,能够适应非结构化、未知的工作环境,开展跳跃机器人的研究具有重要的实际应用价值。本组以仿生青蛙为切入点,深入分析青蛙的生物骨骼特性,将青蛙的骨骼结构和运动机理运用到机器人设计中,旨在设计出一款能完成“跳跃”的仿生青蛙机器人。
本组设计从挑战赛出发,立足《设计与制造Ⅱ》课程要求,在十六周的理论学习基础上,通过小组协作,完成从概念设计、建模、样机制作、优化调整等多个过程。
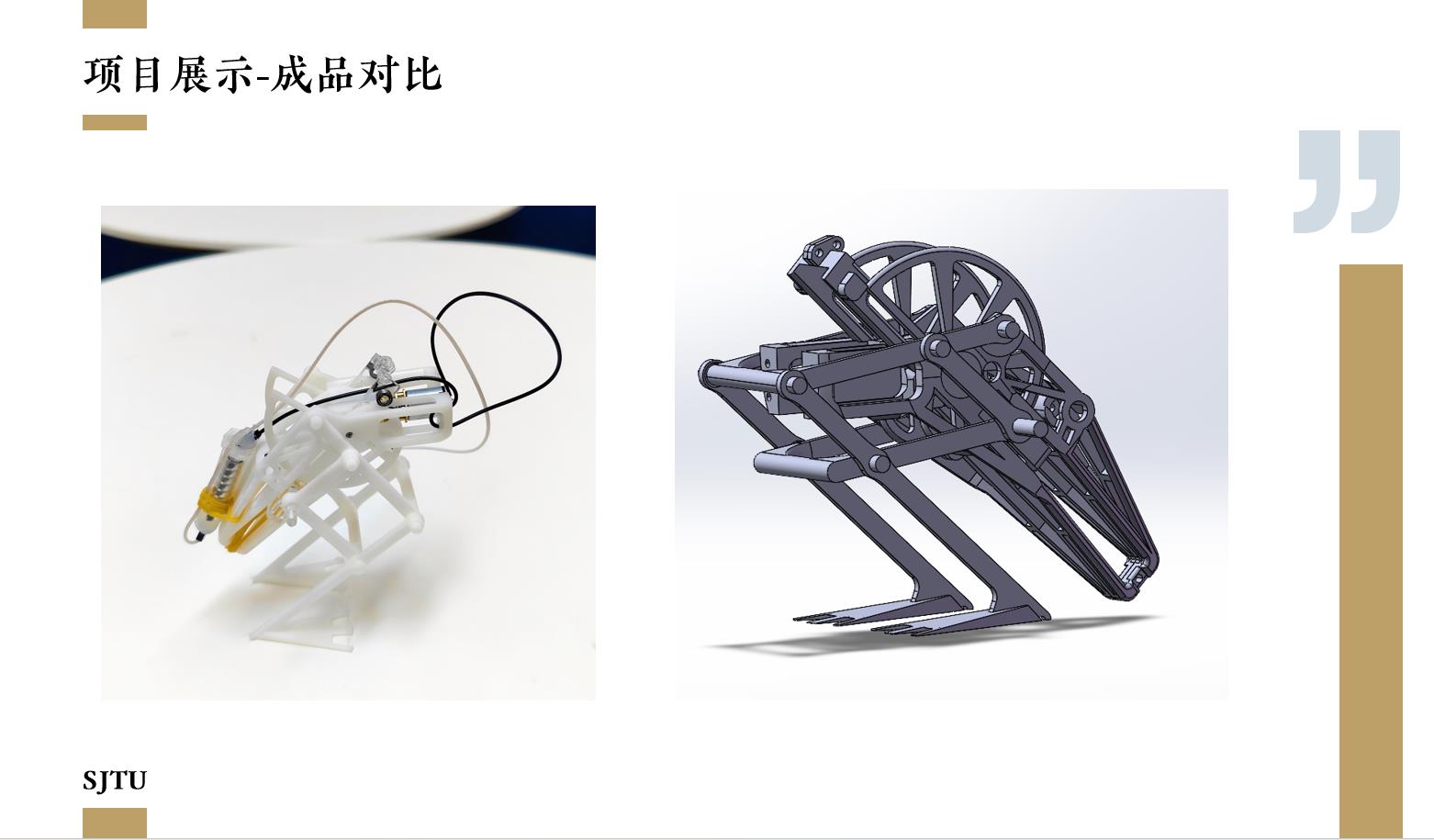
本组顺利完成了本次“仿生青蛙机器人的研究与设计”主题项目。本组仿生青蛙机器人不乏创新点,为减轻重量,并未加入电控部分,使得设计产品为单纯的机械连杆机构,符合本学期课程大纲内容。同时,对于《设计与制造Ⅱ》课程要求的“凸轮”章节,本组进行深入研究探讨,采用自主设计的方式达到目标效果。
