
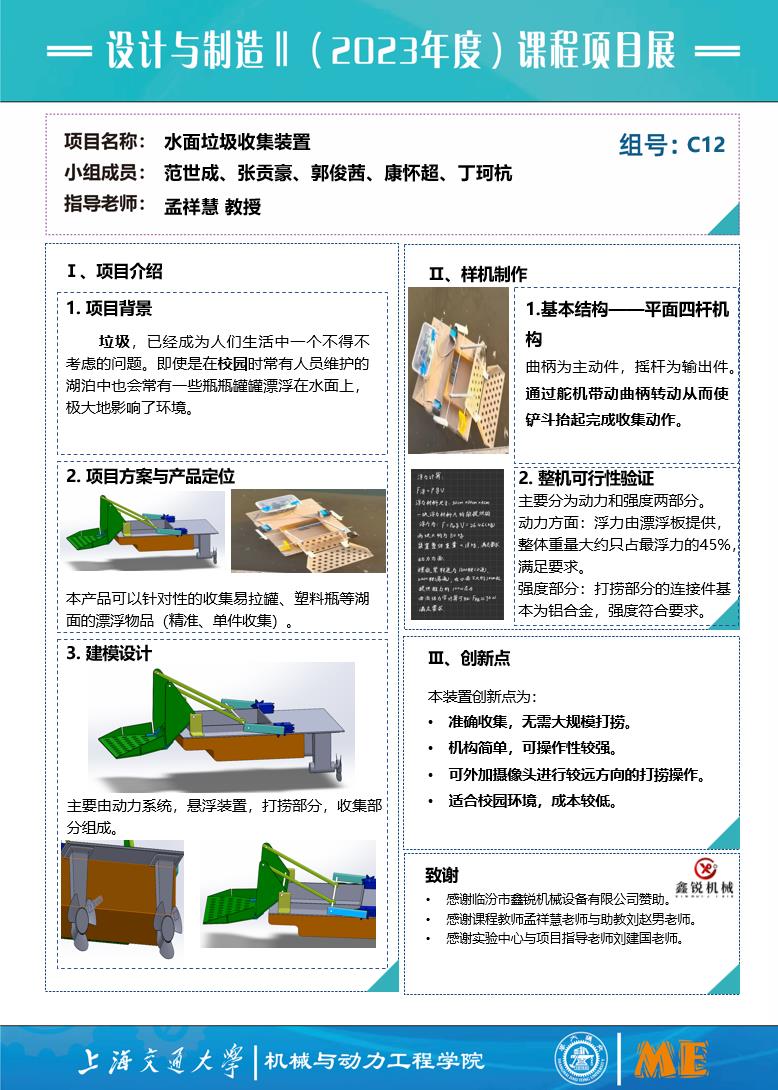
垃圾,已经成为人们生活中一个不得不考虑的问题。即使是在校园时常有人员维护的湖泊中也会常有一些瓶瓶罐罐漂浮在水面上,极大地影响了环境。
校园垃圾一直是很多垃圾收集装置很难普及的痛点,因为校园中的垃圾通常分布较为分散,且数量较少,如果使用较大规模的收集装置可能会导致很大程度上的能源浪费,所以现在对于校园垃圾的收集工作,大多数情况下是人工驾驶船只进行手动清理,所以如何寻求一种高效且较为精准的收集方式成为了一项很重要的工作。
本小组实地调查了当前校园中的垃圾分布的情况,致力于寻求一种可以自动操控的遥控的水面垃圾收集装置,目的是减少在收集校园垃圾时造成的资源的浪费,同时避免了人工清理垃圾可能会出现的安全问题。
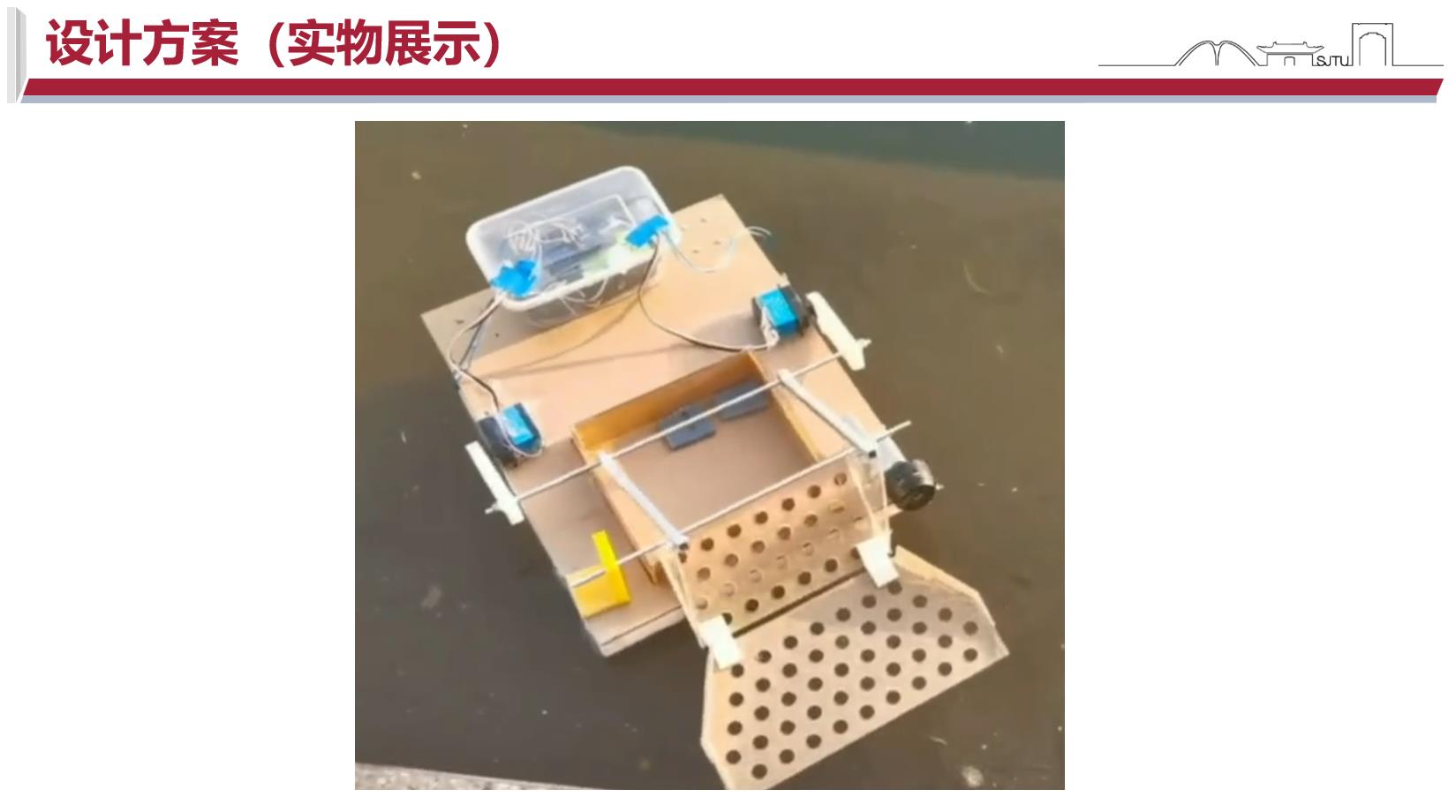
小组成功制作出了样机,且成功验证了其功能的完整性,实现了预期的目标。
