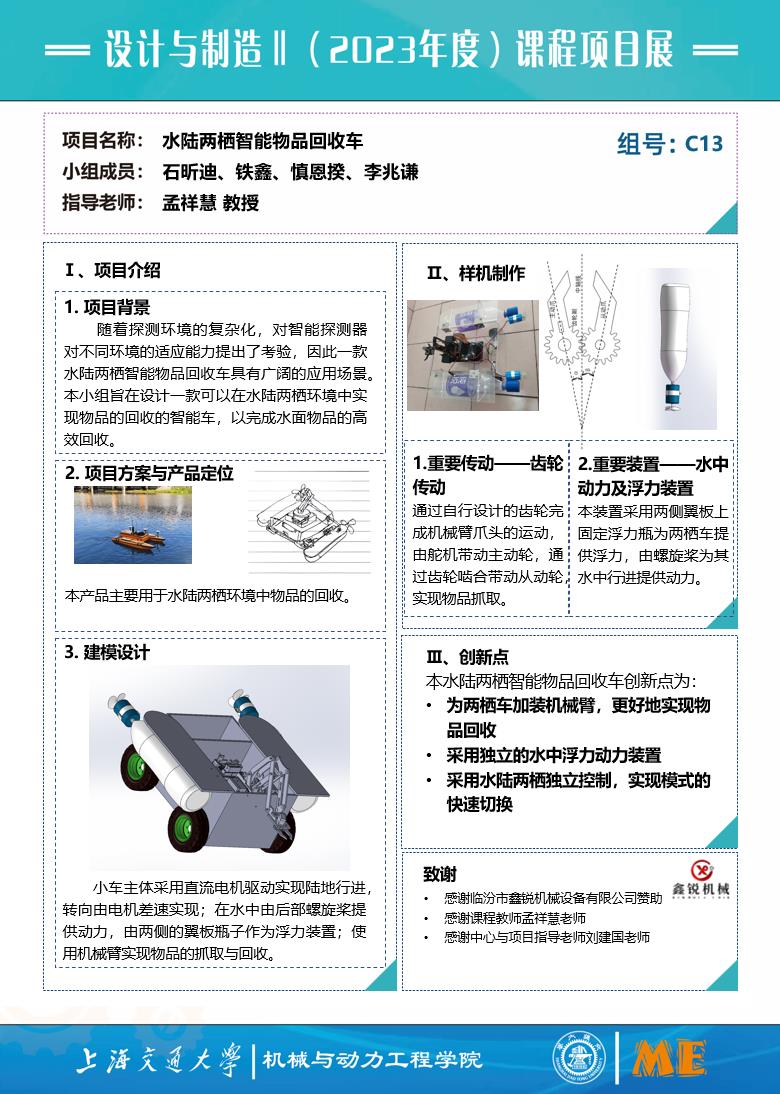
随着探测环境的复杂化,对智能探测器对不同环境的适应能力提出了考验,因此一款水陆两栖智能物品回收车具有广阔的应用场景。
本小组旨在设计一款可以在水陆两栖环境中实现物品的回收的智能车,以完成水面物品的高效回收。
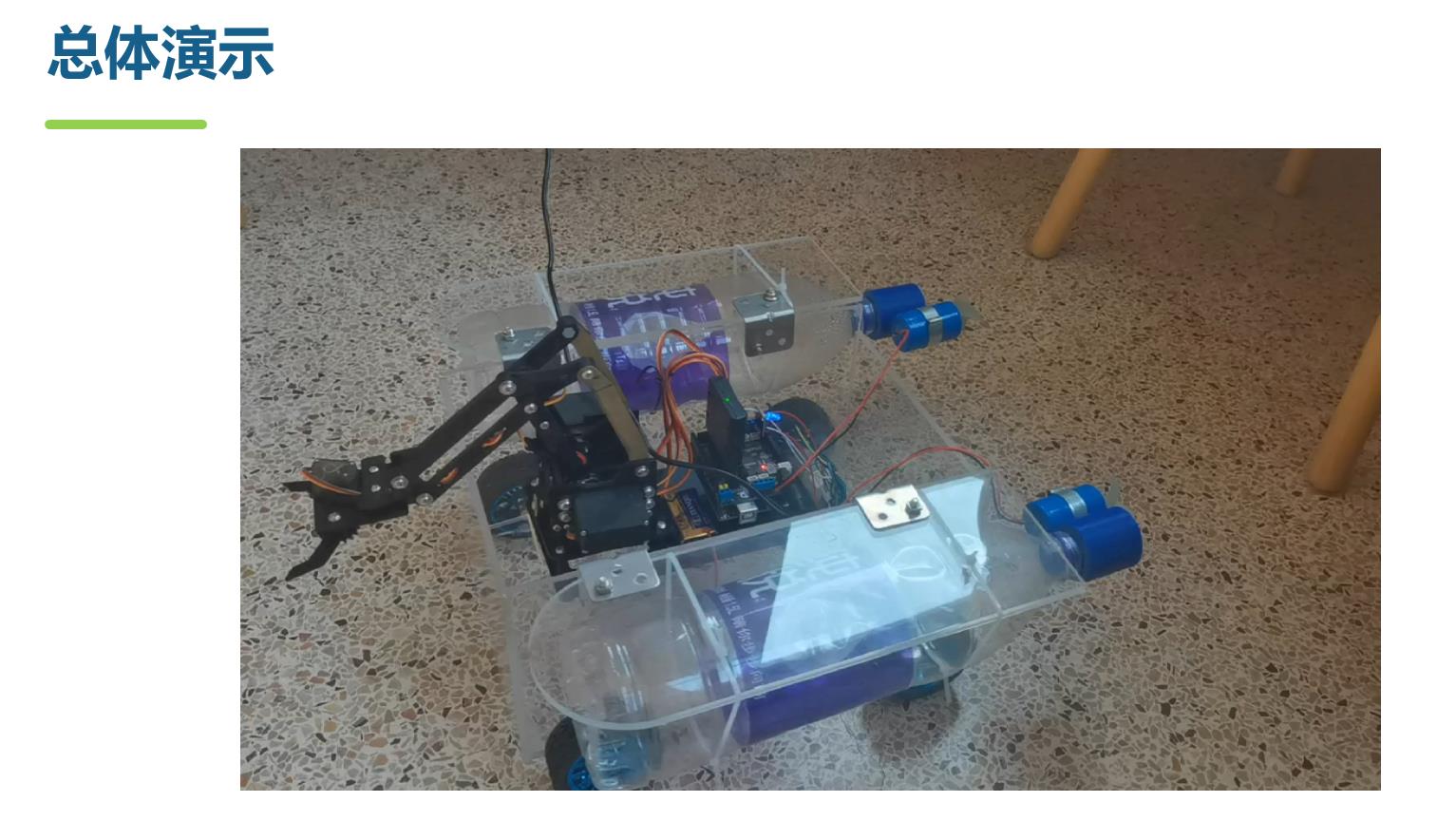
小车主体采用直流电机驱动实现陆地行进,转向由电机差速实现;在水中由后部螺旋桨提供动力,由两侧的翼板瓶子作为浮力装置;使用机械臂实现物品的抓取与回收。小组在实现小车的功能上,为两栖车加装机械臂,更好地实现物品回收;采用独立的水中浮力动力装置;采用水陆两栖独立控制,实现模式的快速切换。