
仿生青蛙一直是仿生机器人中极为热门的项目,这些机器人可以像真正的青蛙一样,在水中移动,追踪污染,研究栖息地,而不会打扰到青蛙。这有助于我们以一种简单有效的方式更好地理解自然。
① 模仿青蛙的跳跃模式,实现机器人的跳跃功能
② 设计小功率蓄能-大功率释放机构,降低舵机最大负载
③ 保证结构强度,确保机器人在调试期间不会出现损坏
④ 结构轻量化,使跳跃距离尽可能的远
⑤ 控制机器人尺寸,使整个机构更加小巧精致
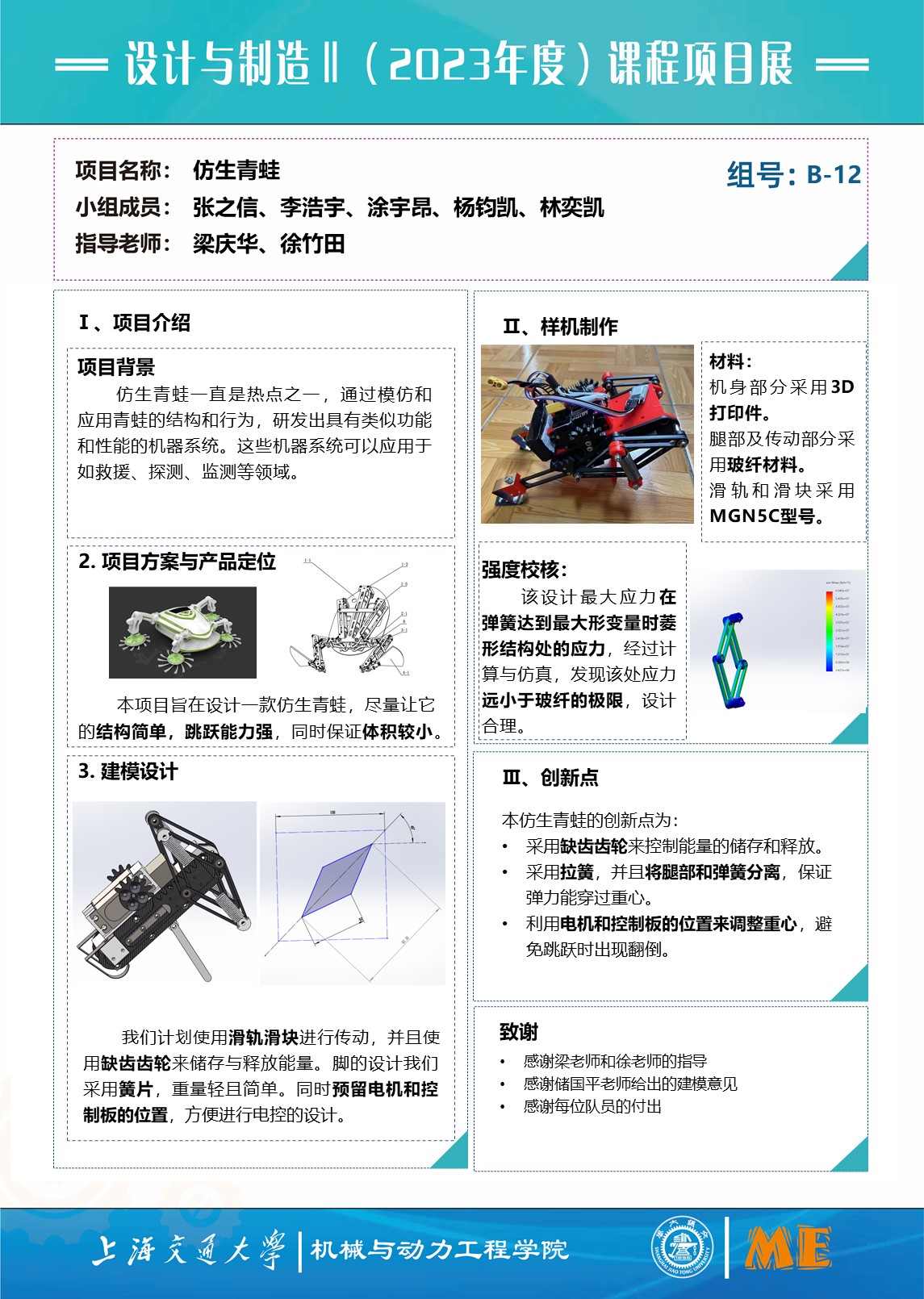
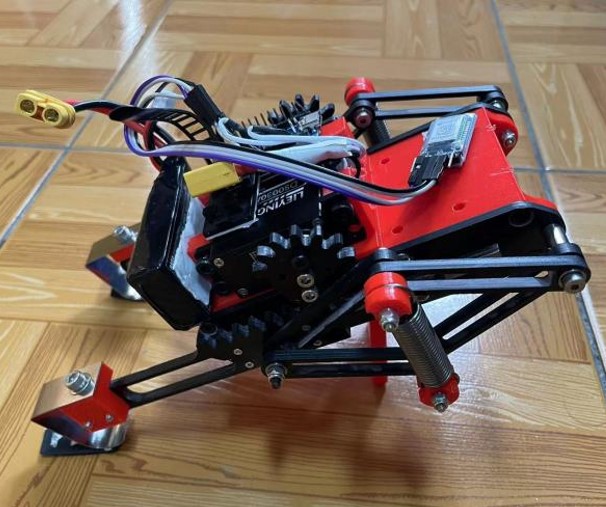
我们综合考虑了结构、重量以及力的传导,设计出了一款仿生青蛙。它跳跃能力强、结构简单、重量适中,但也存在些许缺点,如尺寸较大、落地不稳定等。
