
仿生跳跃机器人同轮式与履带式移动机器人相比机动性较强,可以越过自身高度数倍的障碍物,所具备的突然性与爆发性是另外两种移动式机器人所不能比拟的,这也为仿生跳跃机器人应用于抢险勘测、反恐侦查、军事侦察等特殊领域提供了应用可能。
而自然界的青蛙具备超强的跳跃能力,青蛙经过不断的进化已经发展出前腿短小、后腿强壮发达、适合于采用跳跃方式进行移动的生理结构。青蛙一次跳越能到达自身长度的12倍远的距离,跳跃能力强。青蛙的后腿粗壮有力,平时折叠在一起,跳跃主要靠后肢突然由压缩态释放产生的冲击力,后腿的外型与原理都跟弹簧相似。由于青蛙具有超强的跳跃能力,其形态和运动机理就值得我们分析和模仿,进而提高跳跃机器人的跳跃能力。
通过借鉴青蛙跳跃的机制和运动特点,优化跳跃机器人的设计和控制策略,提高其跳跃距离和运动稳定性等方面的性能。
仿生青蛙的具体设计参数如下:
(1)仿生青蛙须有明确的青蛙外形,设计重点是仿青蛙的跳跃运动;
(2)其静态尺寸(长×宽×高)不超过 0.1m×0.1m×0.1m,跳跃变形后尺寸不超过 0.2m×0.1m×0.1m;
(3)使用电池作为原始能源,电池电压不超过 24V,作品总质量不超过 4kg,比赛前不准预先存储机械能。
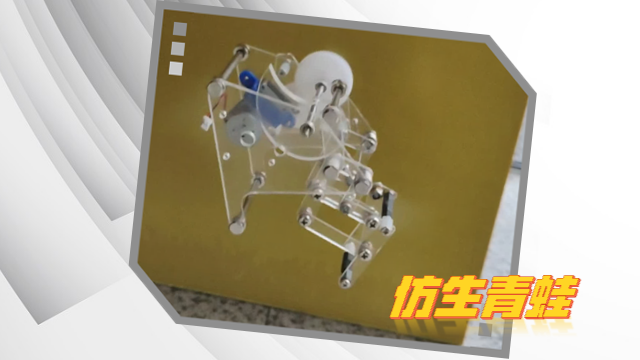
设计并制作了一款基于不完全凸轮驱动的连杆后腿仿生青蛙。
