
跳跃机器人作为一种特殊的移动机器人,具有轮式和履带式移动机器人不可比拟的运动爆发力和越障能力,在复杂环境中替代人类工作和未知领域开发方面有着广阔的应用前景。
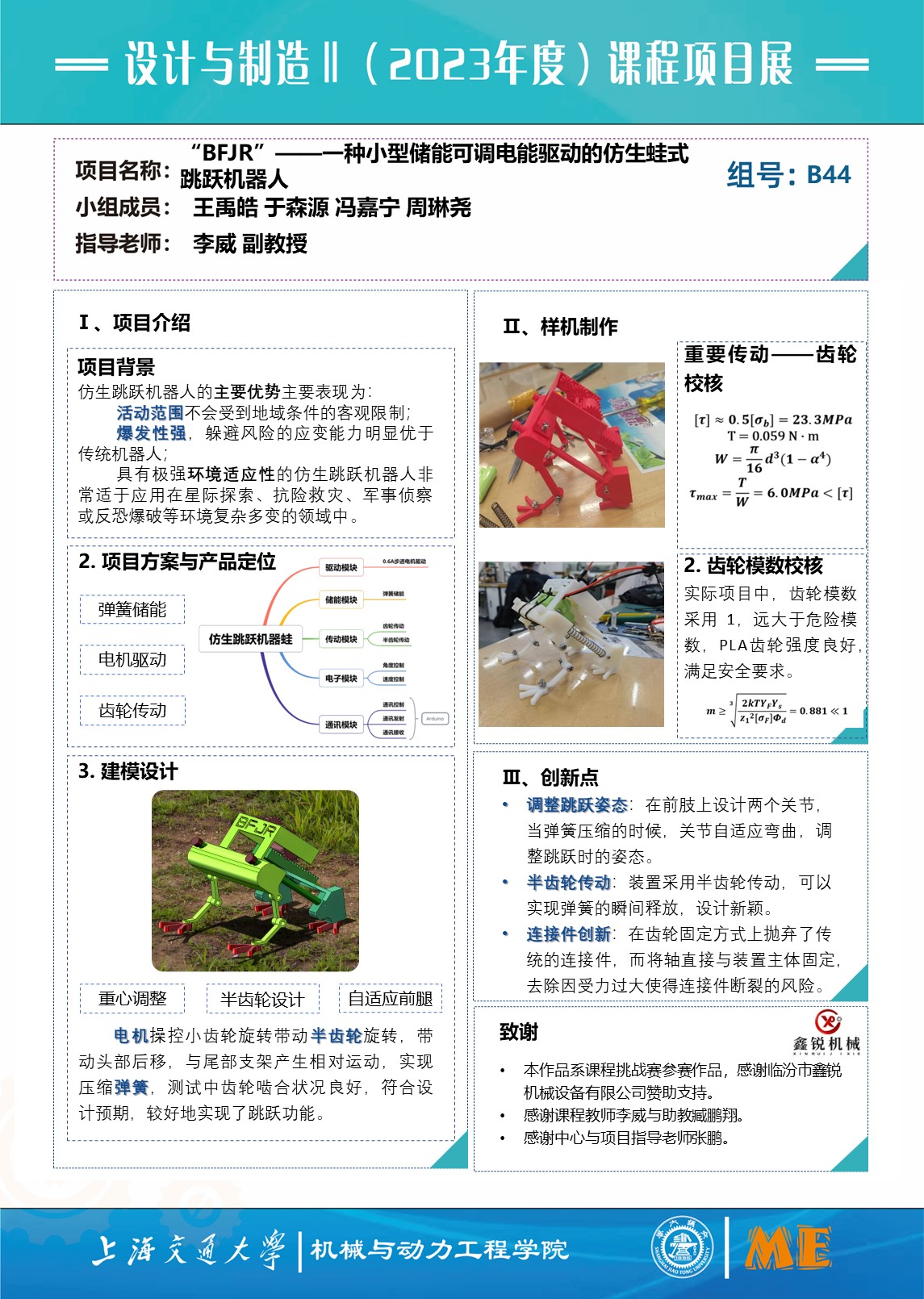
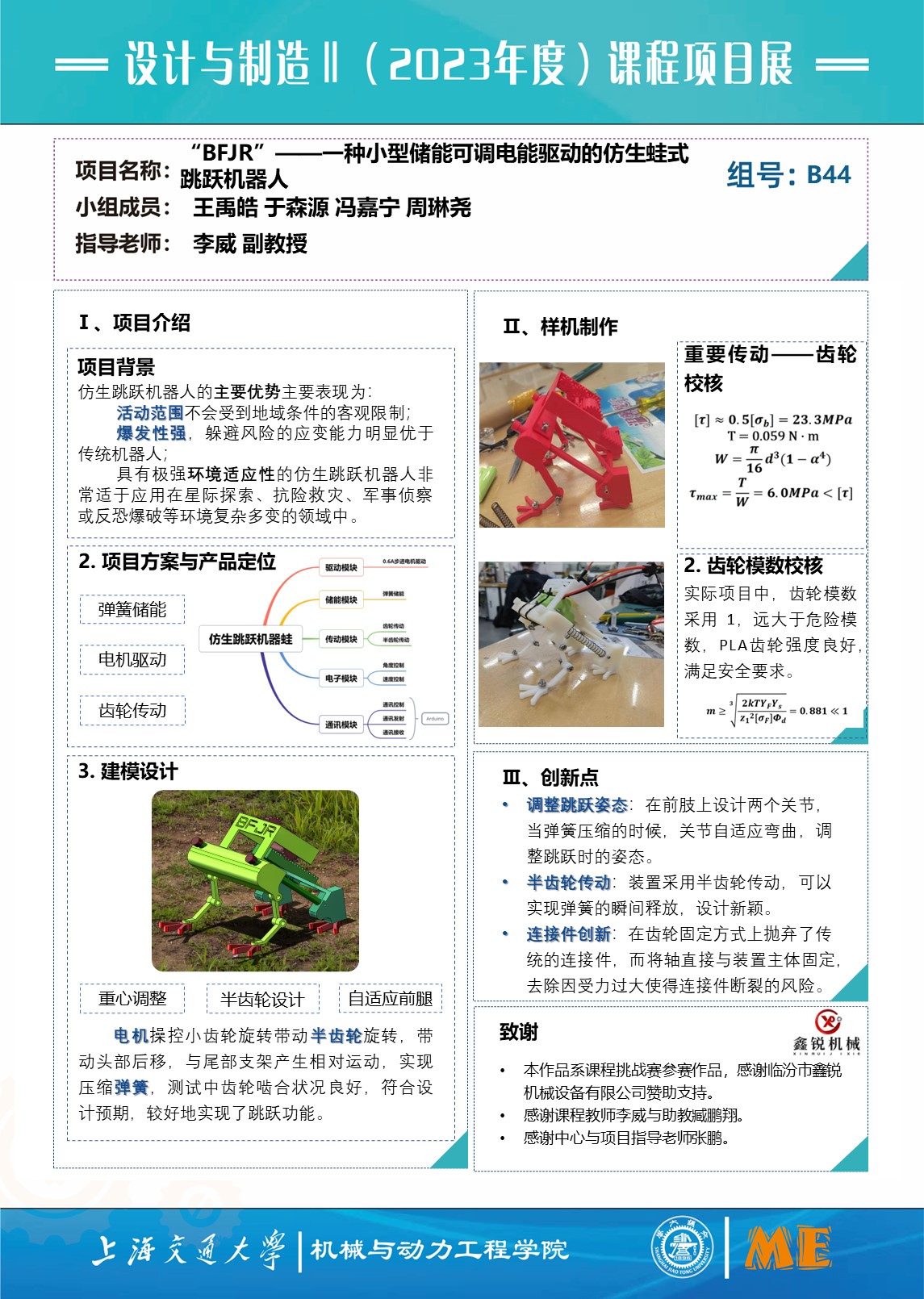
仿生跳跃青蛙机器人作为常见的跳跃机器人,其亦有着灵活的应用场景。本项目为目标参加比赛的仿生跳跃式机器人,依靠电能驱动电机,并通过弹簧实现储能,短时间释放从而实现跳跃。
项目目标为设计实现以下模块:
(1)驱动模块。
(2)储能模块。
(3)传动模块。
(4)电子模块。
(5)通讯模块。
本项目实现了如下成果:
(1)调整跳跃姿态:在前肢上设计两个关节,当弹簧压缩的时候,关节自适应弯曲,调整跳跃时的姿态。
(2)半齿轮传动:装置采用半齿轮传动,可以实现弹簧的瞬间释放,设计新颖。
(3)连接件创新:在齿轮固定方式上抛弃了传统的连接件,而将轴直接与装置主体固定,去除因受力过大使得连接件断裂的风险。
