

仿生蛙机器人旨在模仿蛙类的生理结构和行为特征,将其应用于人工机器人的设计与制造中。这一领域的研究将结合生物学、工程学和计算机科学等多个学科,以开发出高度智能、适应性强的机器人系统,具有潜在的广泛应用前景。
通过模仿蛙类的生理结构和运动方式,研究人员可以深入探索生物系统的原理,为生物学和生态学等领域提供新的见解。
项目目标为设计并制作符合以下要求的仿生蛙机器人:
(1)通过后腿屈伸的方式进行跳跃,并且单次跳跃能够达到较远距离。
(2)仿生蛙落地后姿态平稳,不会出现侧翻现象。
(3)机器人的弹跳能够通过舵机和arduino板进行控制。
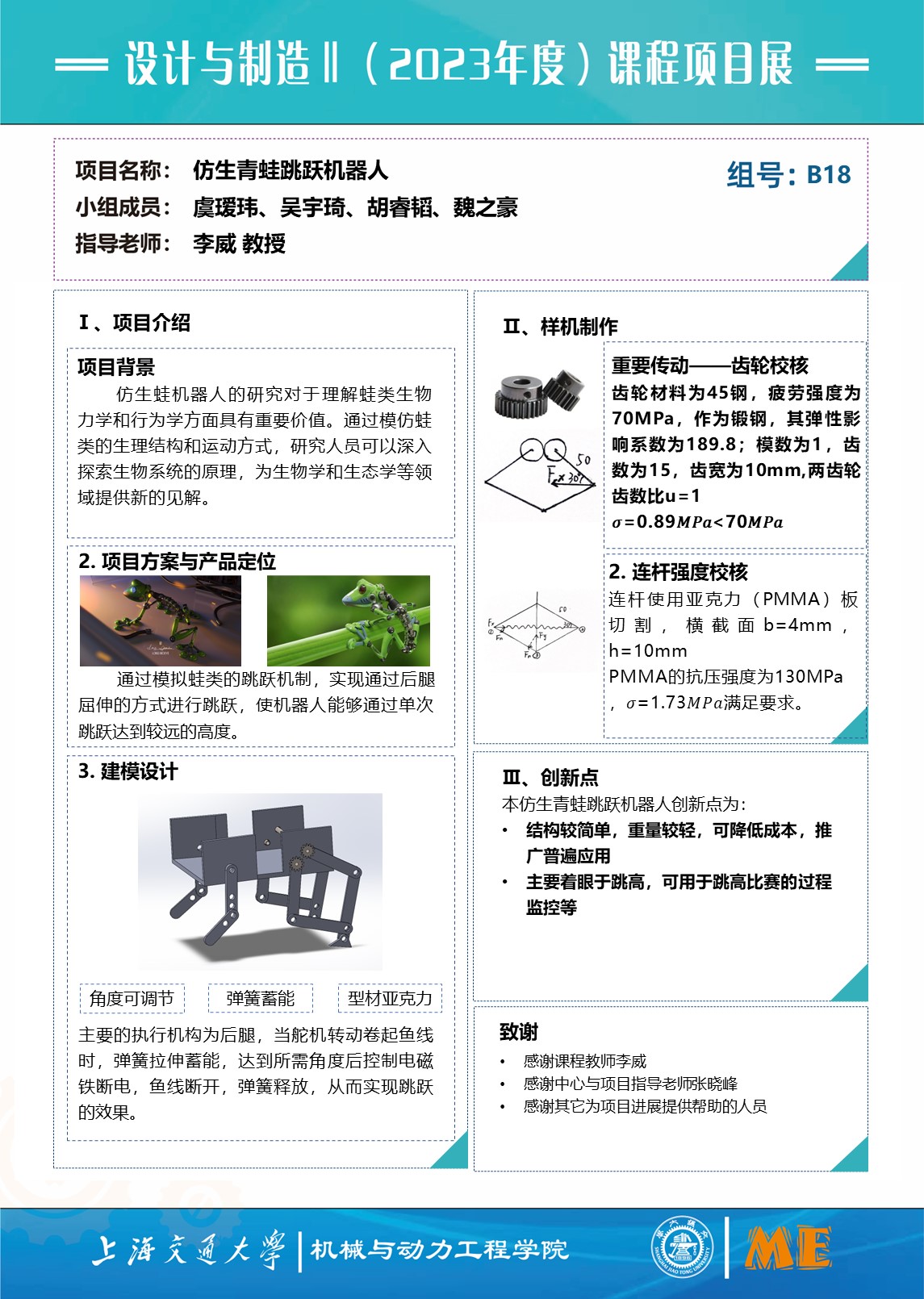
本项目通过深入研究蛙类的生理结构和运动机理,设计和制造一种高度仿真的仿生蛙机器人,进而实现了模拟青蛙的跳跃运动,通过驱动齿轮带动弹簧收缩蓄能,达到了使机器人跳跃的目的。
项目实现了以下创新:
(1)结构较简单,重量较轻,可降低成本,推广普遍应用。
(2)主要着眼于跳高,可用于跳高比赛的过程监控等。
