

跳跃性机器人是自主机器人领域中重要的一个分支。其中,仿生青蛙机器人基于仿生学原理,模仿青蛙的高效能量传递结构,克服了传统跳跃性机器人难一次性越过较大的障碍物或沟渠的问题。因此,我们希望开发一款专注于越障与跳远的仿生青蛙机器人。
需求端:落脚点分散、落地接触面积小、地形适应性强、跨越障碍高效、应用场景丰富
设计端:稳定性、越障性、仿生性、控制性
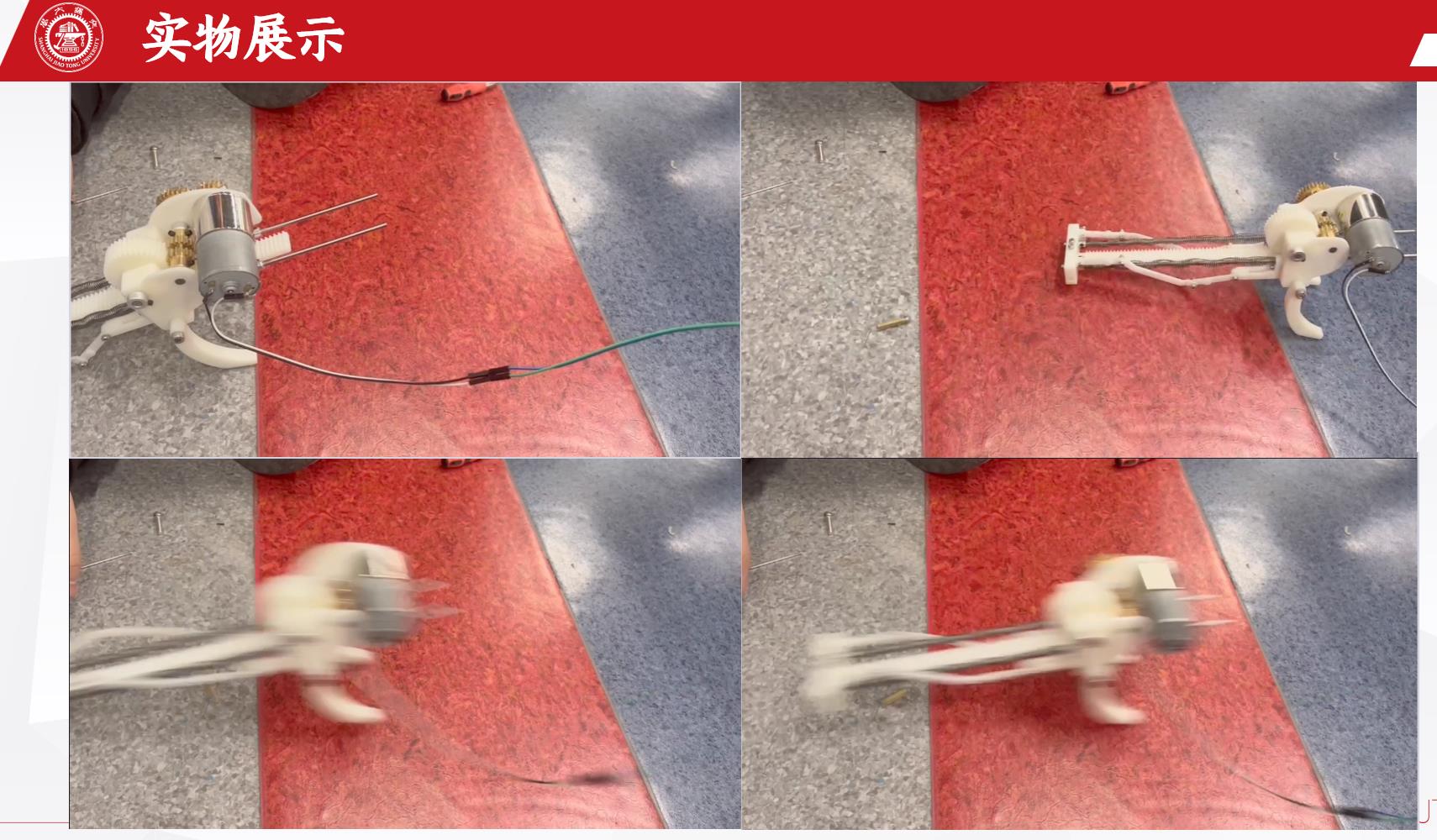
通过动力模块、储能模块、电控模块间的相互配合,初步成功实现了仿生青蛙机器人的设计:电机通过齿轮传动,缺齿齿轮在齿条上转动带动机架沿着顶针向下移动,同时压缩弹簧储存能量,当缺齿齿轮的缺齿部分与齿条接触时,弹簧释放能量,机器人跳出。整体与青蛙较为类似。
