

随着机器人的应用范围越来越广泛,其面临的环境也越来越恶劣,复杂多变的外部地形环境就要求机器人具备很强的自由运动能力,而跳跃机器人可以越过数倍甚至数十倍与自身尺寸的障碍物,能够非常高效地通过复杂地形。
(1)得到一个具有跳跃能力的仿生青蛙样机。
(2)适应复杂环境,着陆和起跳平稳。
(3)符合尺寸要求,静态尺寸不超过10×10×10cm,跳跃变形不超过20×10×10cm。
本小型仿生四足弹跳机器人创新点为:
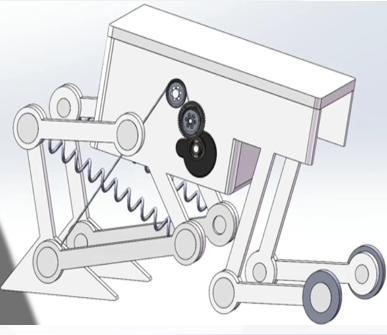
前服杆件的关节处都添加扭备以增大弹性势能以及发挥缓冲作用,前腿着地处采用滚轮结构来降低失稳的可能,
能量的储存机构采取拉伸弹簧储能,减少弹备弯曲变形,且采用非线性弹跳模型,非线性弹跳模型在较小形变时提供的弹跳力显著大于线性弹跳模型
