
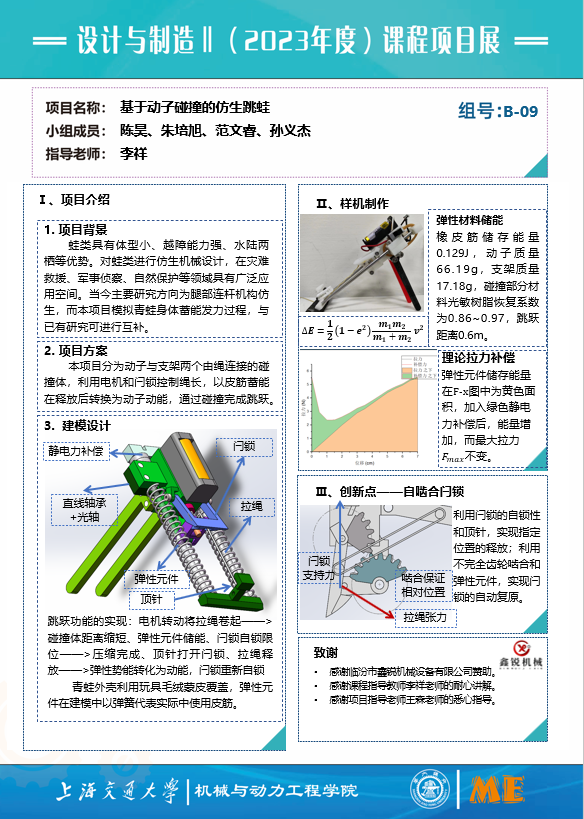
青蛙具有体型小,越障能力强、水陆两栖等优势,对蛙类进行仿生机械设计,在灾难救援、军事侦察、自然保护等领域具有广泛应用空间。当今主要研究方向为腿部连杆机构仿生,而本项目模拟青蛙身体蓄能发力过程,与已有研究可进行互补
(1)得到一个具有跳跃能力的仿生青蛙样机。
(2)适应复杂环境,着陆和起跳平稳。
(3)符合尺寸要求,静态尺寸不超过10×10×10cm,跳跃变形不超过20×10×10cm。
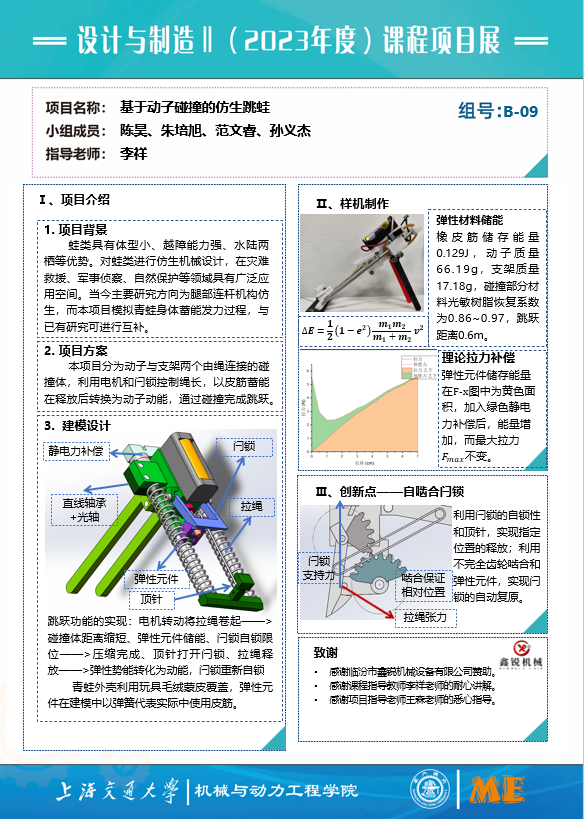
该项目有以下创新点:利用闩锁的自锁性和顶针,实现指定位置的释放;利用不完全齿轮啮合和弹性元件,实现闩锁的自动复原
