
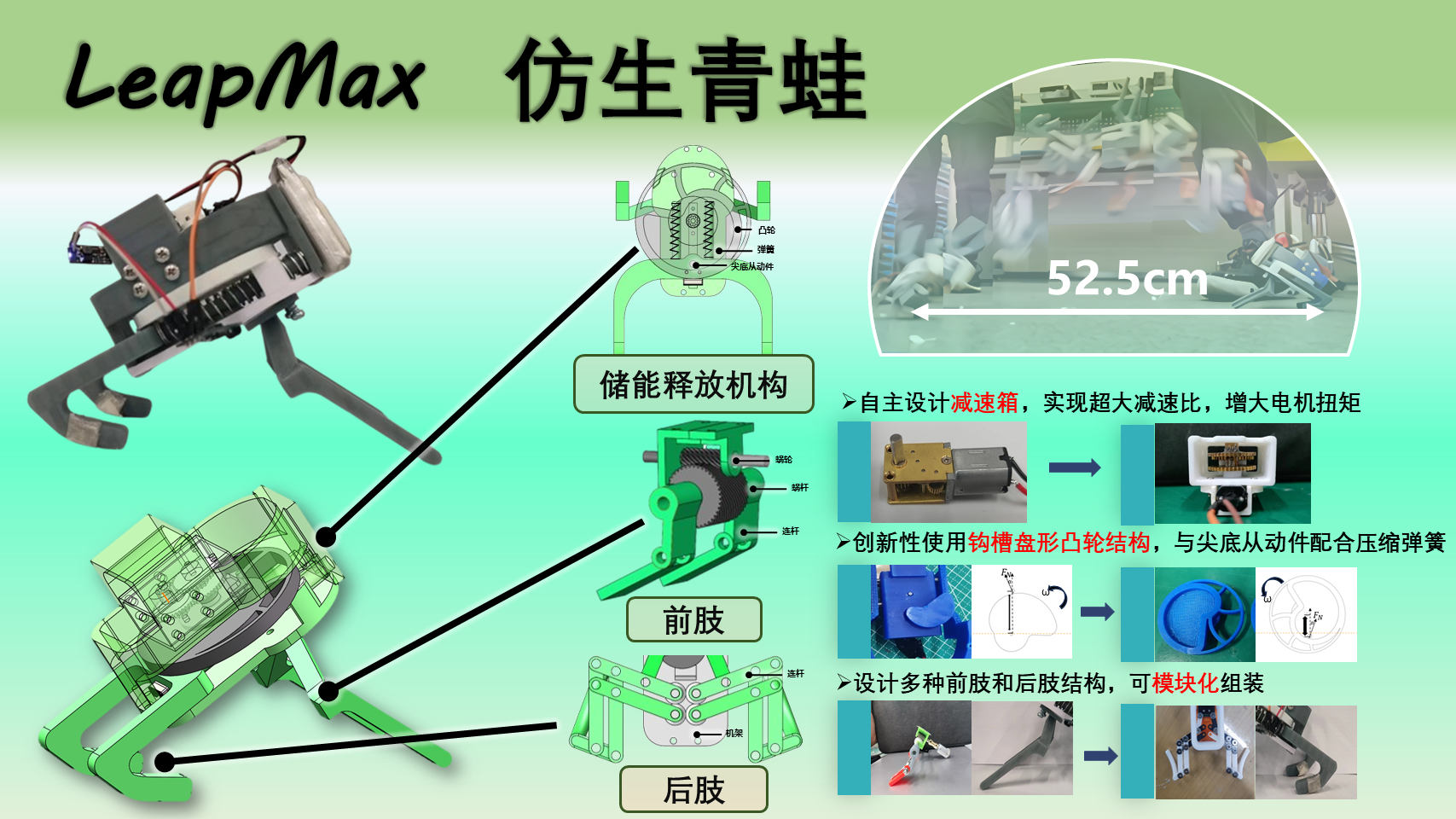
本项目成功制作了一款仿生青蛙机器人,通过采用内凸轮驱动连杆牵引机构的方式进行驱动。为了实现高度定制化和设计自由度,主体结构采用了3D打印制造技术。最终的机器人重量为156.3克,具备出色的轻量化特性。在跳跃性能方面,该机器人展现出了令人印象深刻的能力,最远跳跃距离高达52.5厘米。
本项目除机械结构设计外还对电控系统和数字孪生上位机系统进行了协同设计,自主搭建了仿生青蛙跳跃应力测量平台,利用应变片对青蛙在不同起跳角度下对地面的反冲应力的测量,以及通过MPU6050对青蛙的运动姿态和位移进行惯性导航的效果。
这一成果不仅展示了仿生机器人领域的创新和进步,也为将仿生技术应用于实际应用提供了有力的证明。这项项目的成功将为未来的仿生工程研究和机器人设计提供宝贵的经验和启示。
1. 制作一款可以跳跃的仿生青蛙机器人,要求跳跃距离超过半米;
2. 机器人的形态尽可能的与青蛙相似;
3. 搭建可控制青蛙的上位机平台;
4. 搭建用于测量青蛙起跳反冲应力以及用于姿态和位置惯性导航的测试平台。
1. 搭建可跳跃的仿生青蛙机器人,最远跳跃距离达到52.5cm

2. 利用python和matlab搭建青蛙控制和测量数据处理的数字孪生平台;
3. 搭建青蛙起跳应力测量平台和角度位移测量平台,并成功进行测量实验;



