
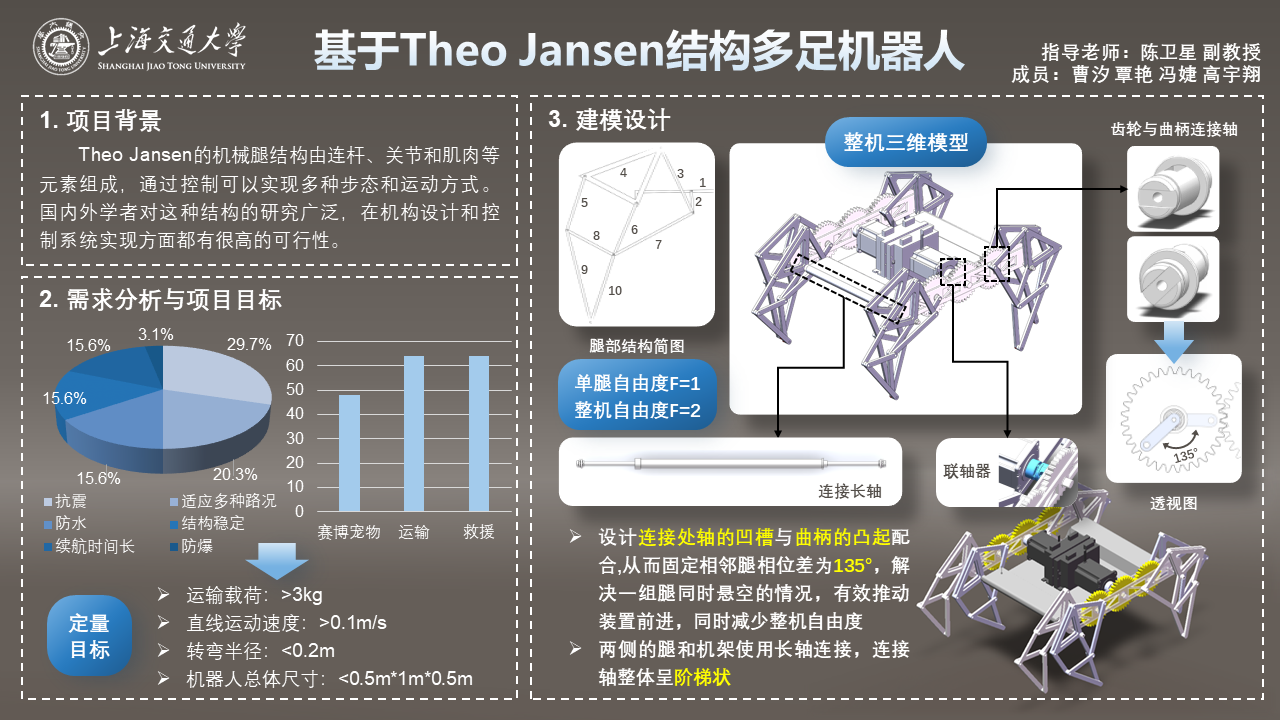
本项目立足于诸多救灾机器人的优势和控制过于复杂的劣势,基于Theo Jansen的Strandbeests中应用的机械结构,通过对结构零件的长度等数值进行优化,使之更适应灾情的场景。本项目最后使用若干杆件和两个电机,整机总计两个自由度,使用Arduino进行电路控制,控制简单,可行性高,运动稳定。
参数指标如下:
l 运输载荷:>3kg
l 直线运动速度:>0.1m/s
l 转弯运动速度:>45°/s
l 转弯半径:<0.2m
l 机器人总体尺寸:<0.5m*1m*0.5m
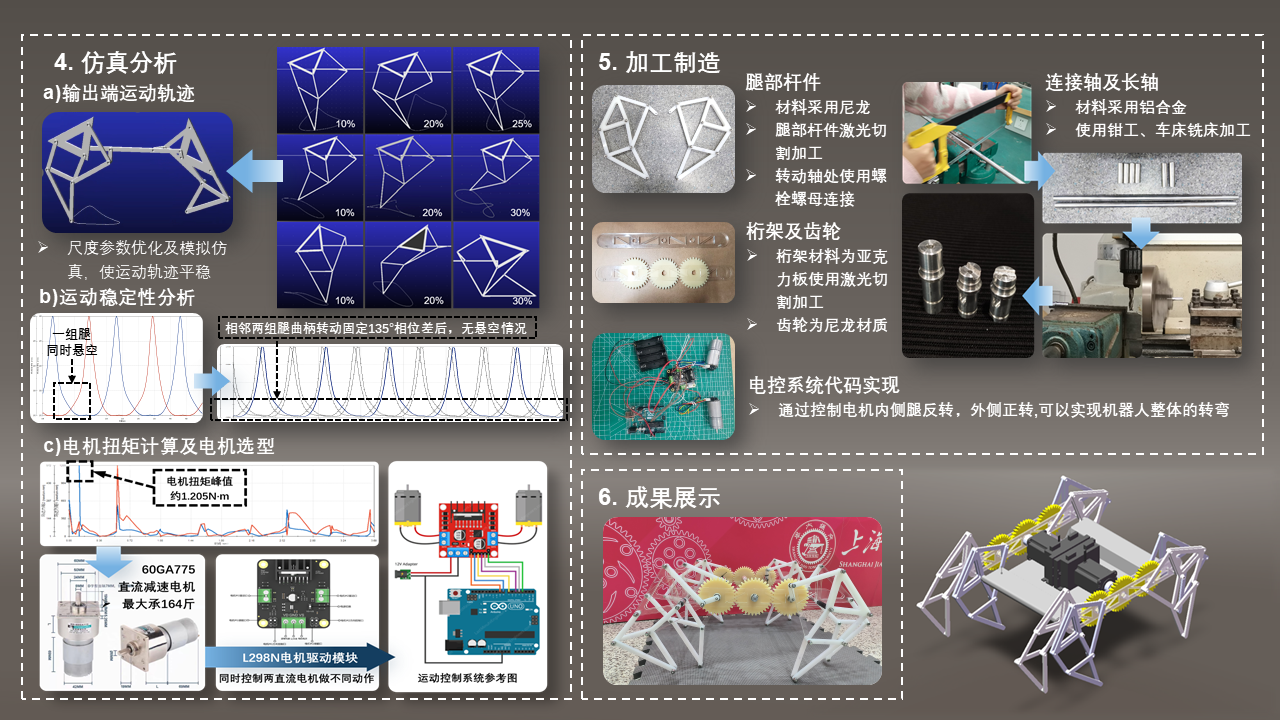
我们通过改进结构设计,使用CAD技术进行模拟和优化,提高Theo Jansen结构的运动稳定性和效率;利用更轻量、强度更高的材料,减轻结构负荷并增加寿命;同时,动力系统优化:对结构的动力传递系统进行改进,从而降低能源消耗并提高运动控制的精度。
总之,通过对Theo Jansen结构的综合优化,我们成功提高了其性能和效率,使其更适用于救援场景。这项工作不仅在机器人领域具有潜在应用,还为未来的结构设计和优化提供了有价值的经验。
