
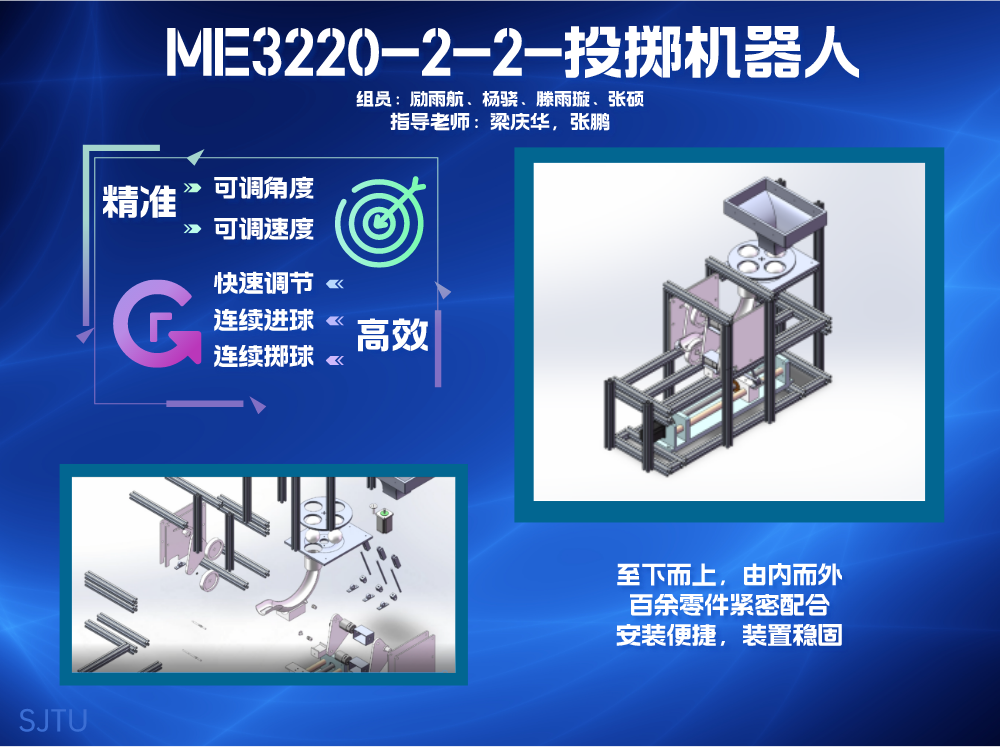
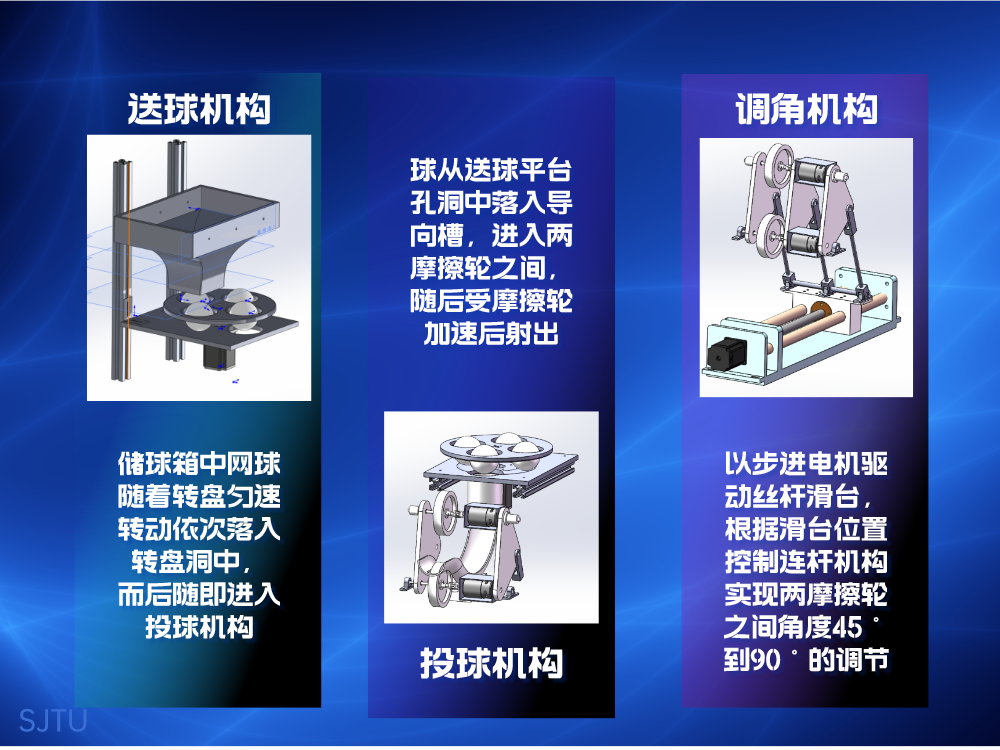
本项目名为“发球机器人”,通过设计机构满足日常生活中网球的投掷,通过摩擦轮配合角度调节机构实现对网球发射角度、速度的调节,能够实现连续快速精准地投掷网球。装置分为送球、角度调节、发射三个部分,各部分之间配合工作。整体体积较小,能够方便移动,而且在不同使用场景下,由于结构稳定性好,装置都能保持正常工作。相比于市场上现有的产品,本项目能够在成本远低于其的条件下实现类似的功能,降低了球类发球机的使用成本。
在一次上球后,能够自动连续发射网球。且网球的发射角度能够在俯仰四十五度之间调节,最远发射距离不小于十五米,且能够适应一定范围大小的网球,能够在网球湿润的情况下保持正常发射。发球机器人的整体重量保持在单人能够移动的范围,通过图像获取能够在不同的场地上自动测定距离调节发射速度和角度,并配合相应的应用能够方便地设置发球的参数,对于初次使用者能够快速上手操作。整体的制造成本控制在1200元以内,同时保持结构的稳定性。
我们对装置的各项性能需求进行了评估,确定了最终的设计目标,完成了各零件的设计和3D建模,并绘制了零件的工程图样,完成了整体装配模型的建模,并对关键零件进行了力学分析。确定了各零件的采购、加工方案和材料的选择,完成了成本计算。最终设计基本实现了预期的各项指标,采用丝杆滑台的方式实现了角度调节。整体采用了铝型材框架,部分复杂零件采用3D打印,并且零件尽量采用标准件,降低了制造成本和制造难度,优化的整体结构也方便了控制,具有较高的完成度。
