
我国肢体残疾的高达2000多万人,这其中有很大部分人基本上不能独立实现日常生活活动,如高位截瘫患者、四肢瘫痪者、双臂缺失患者等等。由于四肢丧失活动能力,大部分高位截瘫痪者主要活动场地在病床上,但他们神志清醒,同时也不可能一天24小时都能被很好地照看到。本小组旨在设计出一款产品来帮助这些身体功能严重障碍的残疾人实现一些基本的功能,如拿取用品、翻阅文本、使用电子产品、按铃、操控轮椅等等,则不仅可以改善他们的生活质量和心理状况,还可以节约人力成本。
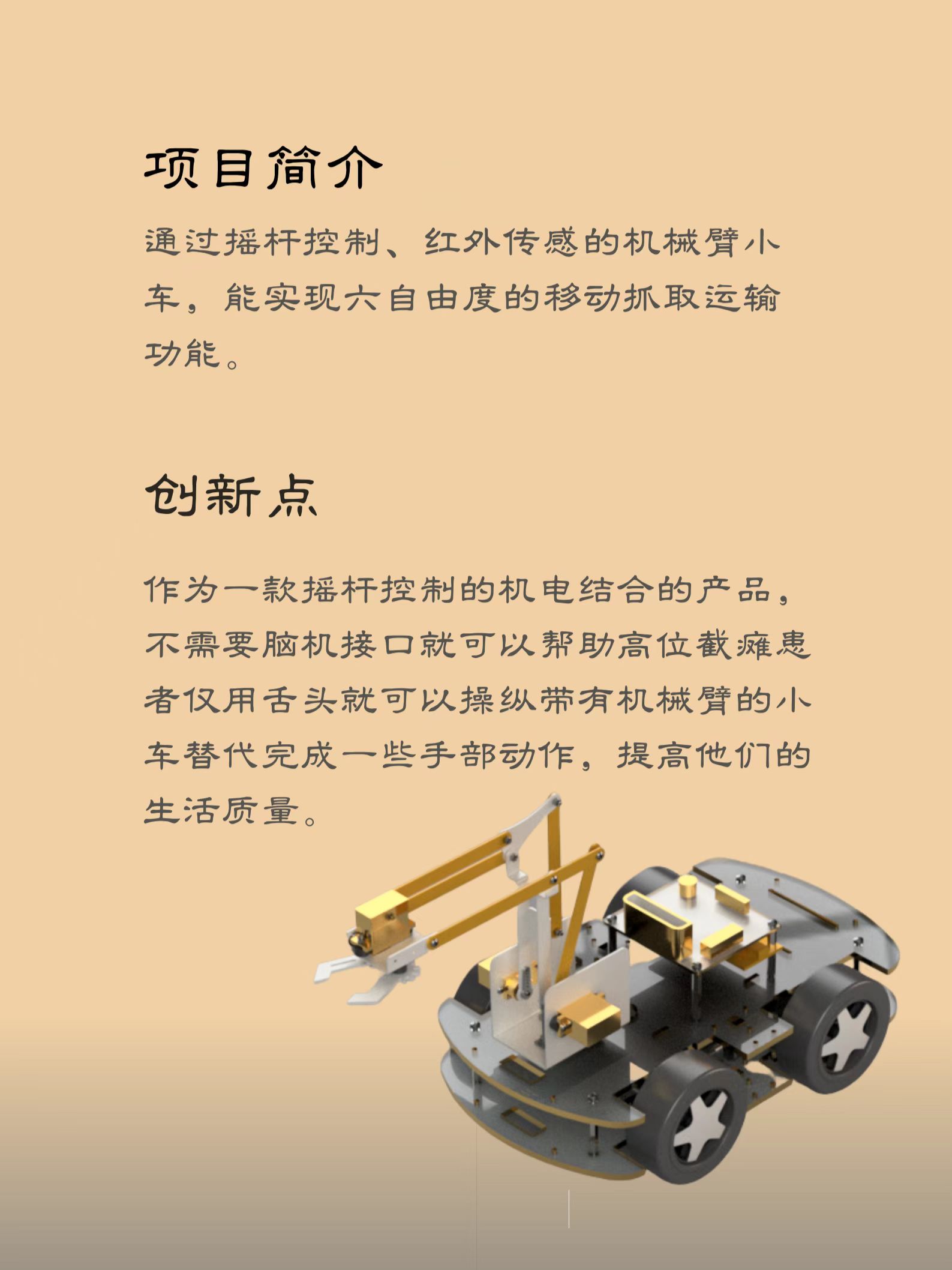
四肢残疾患者或高位截瘫患者虽然四肢功能丧失,但绝大部分患者的神志清醒且舌头能正常活动,并且舌头具有运动直观、抗疲劳性强、不受自身运动状态影响等多种优点。根据四肢残疾人面临的问题以及他们的需求,本小组的项目目标是用舌头控制外装的机械摇杆,利用红外传感技术,采用Arduino开发板,通过不同的操作模式来控制机械臂拿取用品、翻阅文本、使用电子产品、按铃等,为患者解决一些生活上的需求,改善他们的心理状况。
1.单摇杆控制:
七个不同模式,舌头上下拨动摇杆切换模式。0模式:左右拨动摇杆无响应;1~4模式分别对应机械臂上四个舵机,左右拨动摇杆控制机械臂的爪子在xyz三个方向移动以及爪子的抓紧放松;5模式:舌头左右拨动摇杆控制小车前进后退;6模式:舌头左右拨动摇杆控制小车左、右转弯。
2.双摇杆控制:
左摇杆控制小车运动,向上、下、左、右拨动摇杆分别对应小车向前、后、左、右运动;右摇杆控制机械臂,设有3个模式,上下拨动摇杆切换模式,1模式下,左右拨动摇杆控制机械臂在xy平面内顺、逆时针旋转;2模式下,左右拨动控制双臂在竖直面内上下移动;3模式下,左右拨动摇杆控制爪子的夹紧与放松。
