
投掷,作为一项基础机构运动,在生活中有重要作用。他可以远距离完成目标对准并实现物体位移变化,具有省时的便利性,多用于工业、体育、军事等。设计一款投掷机器人,有利于人们在日常中更好地完成生产生活。为进一步实现投掷机器人的使用率提升,本项目组拟设计成本低、具有便携性、多功能性投掷机构,激发投掷机器人更多可能性。基于项目展挑战赛要求,设计装置将网球依次投入五个大小不同的目标区域,除完成项目要求内容外,项目组希望可以开发装置完整性和创新性,于后期增加更多额外技能。
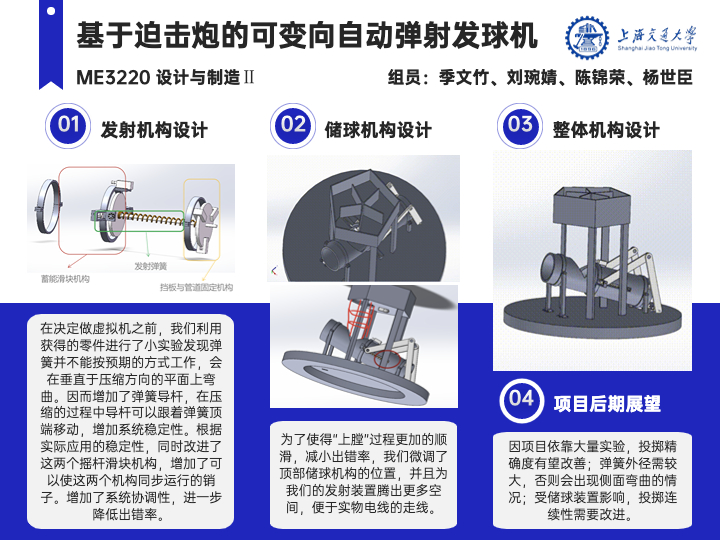
根据弹射式航母启发,我们设计一个机构可以储存弹簧的弹性势能,并且通过摇杆滑块机构作为弹射主要装置来实现弹射功能。为了实现精准弹射功能,我们采用旋转底座来实现改变弹射方向。并且设计了上膛装置,使之可以储存一定量的网球然后自动上膛发射。上膛时,由两个舵机带动摇杆旋转,带动滑块压迫弹簧完成蓄能;由电机通过绳索拉动滑块中的拨片,即可发射网球。舵机旋转不同的角度可以将滑块拉动至不同的位置,可以使弹簧获得的弹性势能不同,以此可以设置不同的档位。网球从顶部储球机构落下时,通过金属丝导轨滑落到发射管内。
设计摇杆滑块机构利用弹簧压迫存储弹性势能进行发射的机构,并在滑轨设计上增加抱箍固定,挡板与轨道固定。增加弹簧导杆,在压缩的过程中导杆可以跟着弹簧顶端移动,避免弹簧会在垂直于压缩方向的平面上弯曲增加系统稳定性。利用电机通过绳索拉动滑块中的拨片实现发射。
使用更简单的旋转片,设计储球机构,网球从顶部储球机构落下时,通过金属丝导轨滑落到发射管内。
设计电机带动齿轮实现底盘旋转进而控制发射方向的底盘旋转机构。
